 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Instance Labeling Leveraging Hierarchical Segmentation
Paper and Code
Aug 02, 2017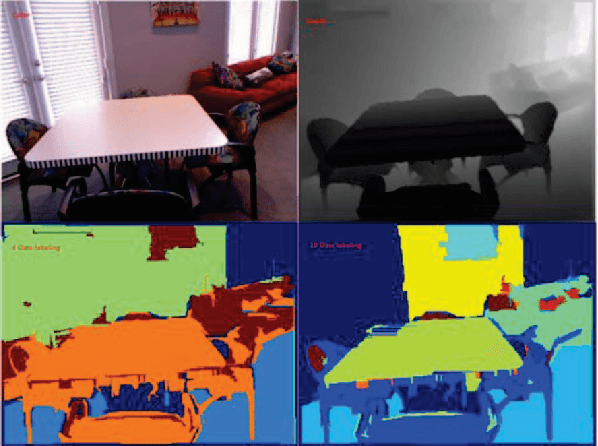
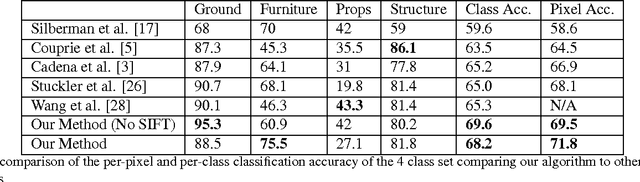
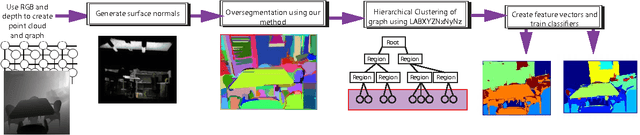
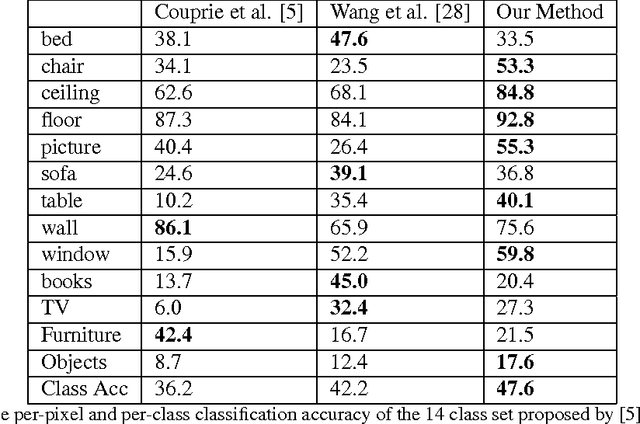
Most of the approaches for indoor RGBD semantic la- beling focus on using pixels or superpixels to train a classi- fier. In this paper, we implement a higher level segmentation using a hierarchy of superpixels to obtain a better segmen- tation for training our classifier. By focusing on meaningful segments that conform more directly to objects, regardless of size, we train a random forest of decision trees as a clas- sifier using simple features such as the 3D size, LAB color histogram, width, height, and shape as specified by a his- togram of surface normals. We test our method on the NYU V2 depth dataset, a challenging dataset of cluttered indoor environments. Our experiments using the NYU V2 depth dataset show that our method achieves state of the art re- sults on both a general semantic labeling introduced by the dataset (floor, structure, furniture, and objects) and a more object specific semantic labeling. We show that training a classifier on a segmentation from a hierarchy of super pixels yields better results than training directly on super pixels, patches, or pixels as in previous work.