 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Flow-guided Motion Removal Method for Robust Mapping
Paper and Code
Oct 14, 2020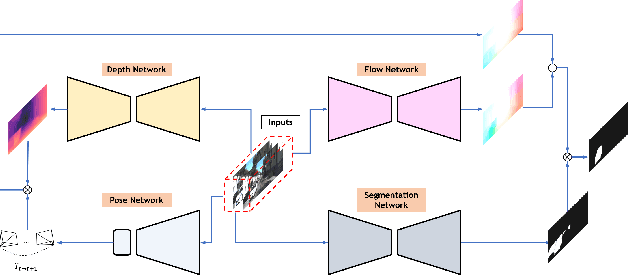
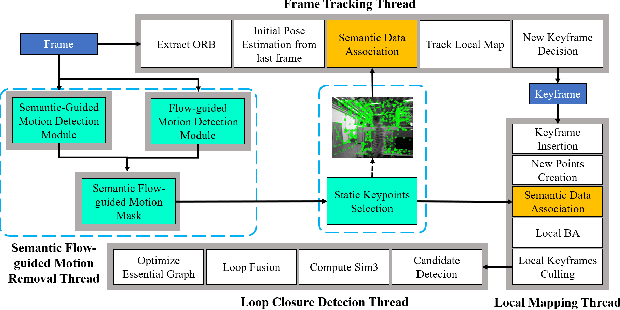
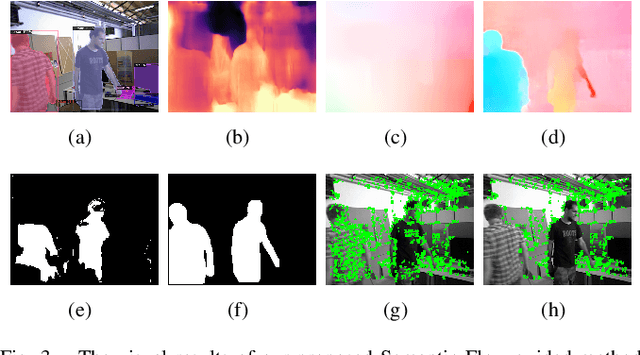
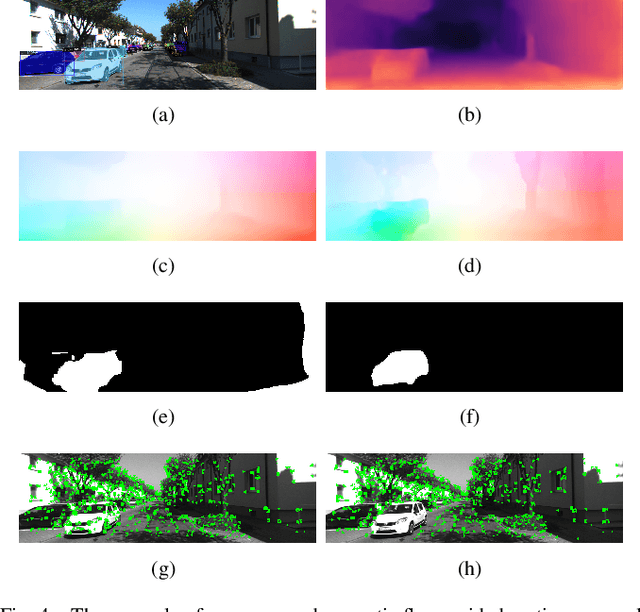
Moving objects in scenes are still a severe challenge for the SLAM system. Many efforts have tried to remove the motion regions in the images by detecting moving objects. In this way, the keypoints belonging to motion regions will be ignored in the later calculations. In this paper, we proposed a novel motion removal method, leveraging semantic information and optical flow to extract motion regions. Different from previous works, we don't predict moving objects or motion regions directly from image sequences. We computed rigid optical flow, synthesized by the depth and pose, and compared it against the estimated optical flow to obtain initial motion regions. Then, we utilized K-means to finetune the motion region masks with instance segmentation masks. The ORB-SLAM2 integrated with the proposed motion removal method achieved the best performance in both indoor and outdoor dynamic environments.