 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Learning to Guide Scientifically Relevant Categorization of Martian Terrain Images
Paper and Code
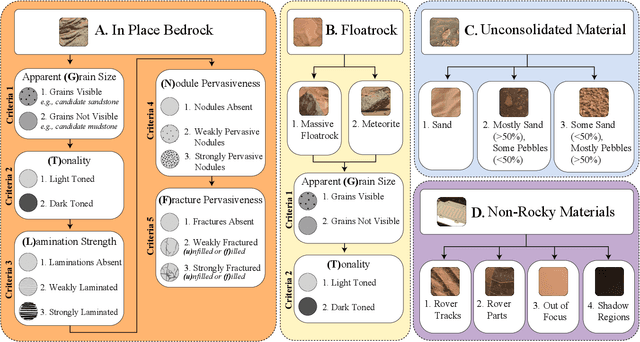
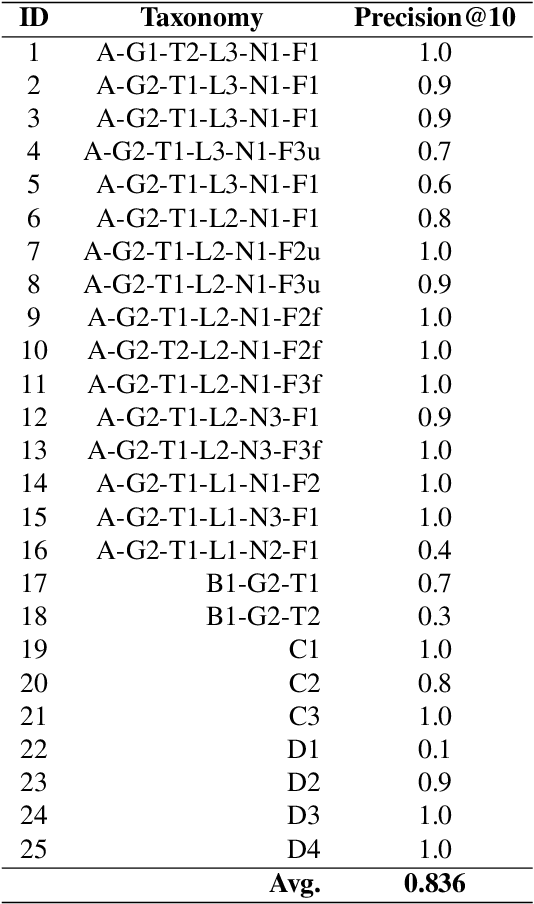
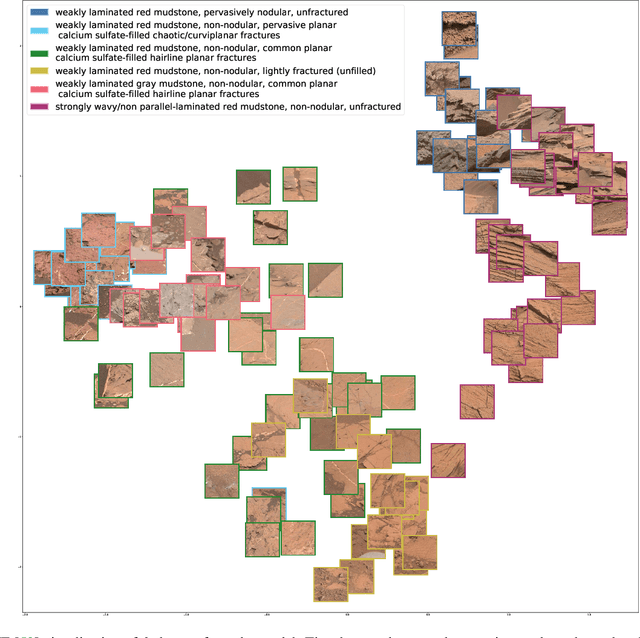
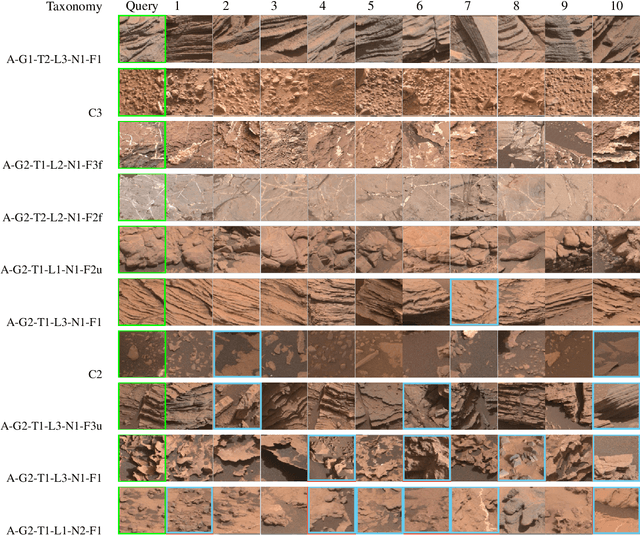
Automatic terrain recognition in Mars rover images is an important problem not just for navigation, but for scientists interested in studying rock types, and by extension, conditions of the ancient Martian paleoclimate and habitability. Existing approaches to label Martian terrain either involve the use of non-expert annotators producing taxonomies of limited granularity (e.g. soil, sand, bedrock, float rock, etc.), or rely on generic class discovery approaches that tend to produce perceptual classes such as rover parts and landscape, which are irrelevant to geologic analysis. Expert-labeled datasets containing granular geological/geomorphological terrain categories are rare or inaccessible to public, and sometimes require the extraction of relevant categorical information from complex annotations. In order to facilitate the creation of a dataset with detailed terrain categories, we present a self-supervised method that can cluster sedimentary textures in images captured from the Mast camera onboard the Curiosity rover (Mars Science Laboratory). We then present a qualitative analysis of these clusters and describe their geologic significance via the creation of a set of granular terrain categories. The precision and geologic validation of these automatically discovered clusters suggest that our methods are promising for the rapid classification of important geologic features and will therefore facilitate our long-term goal of producing a large, granular, and publicly available dataset for Mars terrain recognition.