 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Reflective Risk-Aware Artificial Cognitive Modeling for Robot Response to Human Behaviors
Paper and Code
May 16, 2016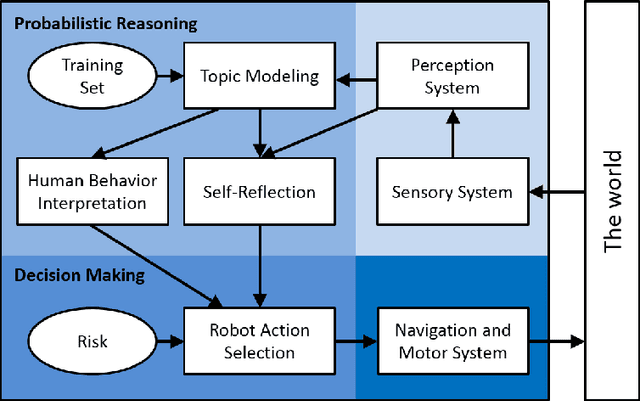

In order for cooperative robots ("co-robots") to respond to human behaviors accurately and efficiently in human-robot collaboration, interpretation of human actions, awareness of new situations, and appropriate decision making are all crucial abilities for co-robots. For this purpose, the human behaviors should be interpreted by co-robots in the same manner as human peers. To address this issue, a novel interpretability indicator is introduced so that robot actions are appropriate to the current human behaviors. In addition, the complete consideration of all potential situations of a robot's environment is nearly impossible in real-world applications, making it difficult for the co-robot to act appropriately and safely in new scenarios. This is true even when the pretrained model is highly accurate in a known situation. For effective and safe teaming with humans, we introduce a new generalizability indicator that allows a co-robot to self-reflect and reason about when an observation falls outside the co-robot's learned model. Based on topic modeling and two novel indicators, we propose a new Self-reflective Risk-aware Artificial Cognitive (SRAC) model. The co-robots are able to consider action risks and identify new situations so that better decisions can be made. Experiments both using real-world datasets and on physical robots suggest that our SRAC model significantly outperforms the traditional methodology and enables better decision making in response to human activities.