 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSE-SSD: Self-Ensembling Single-Stage Object Detector From Point Cloud
Paper and Code
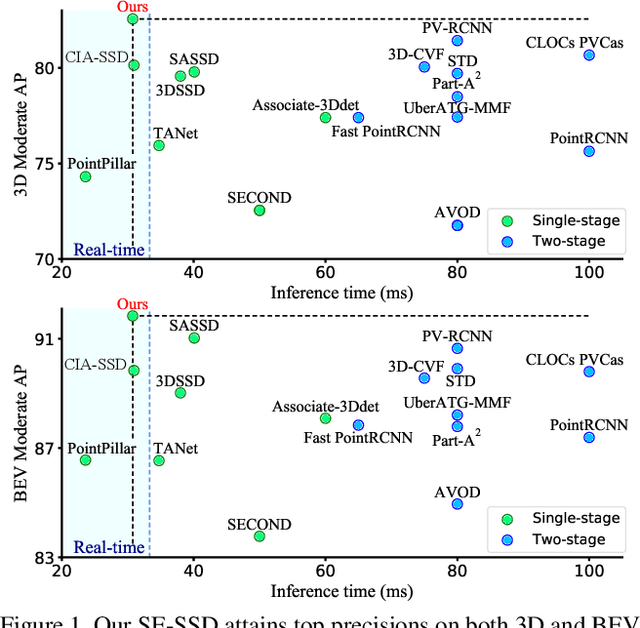
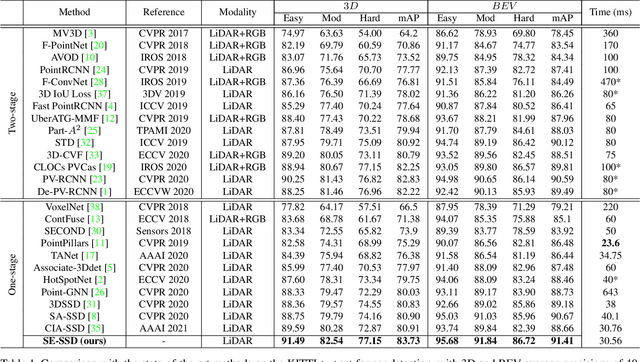
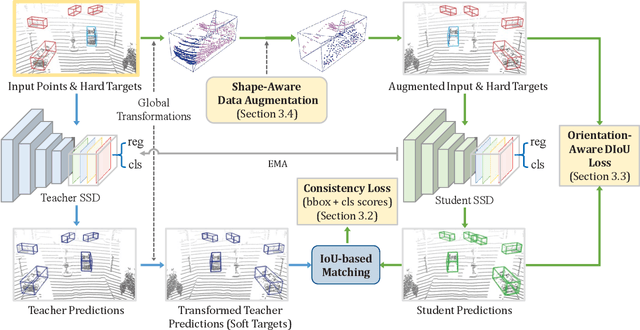
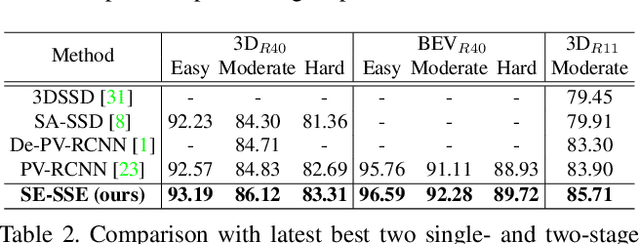
We present Self-Ensembling Single-Stage object Detector (SE-SSD) for accurate and efficient 3D object detection in outdoor point clouds. Our key focus is on exploiting both soft and hard targets with our formulated constraints to jointly optimize the model, without introducing extra computation in the inference. Specifically, SE-SSD contains a pair of teacher and student SSDs, in which we design an effective IoU-based matching strategy to filter soft targets from the teacher and formulate a consistency loss to align student predictions with them. Also, to maximize the distilled knowledge for ensembling the teacher, we design a new augmentation scheme to produce shape-aware augmented samples to train the student, aiming to encourage it to infer complete object shapes. Lastly, to better exploit hard targets, we design an ODIoU loss to supervise the student with constraints on the predicted box centers and orientations. Our SE-SSD attains top performance compared with all prior published works. Also, it attains top precisions for car detection in the KITTI benchmark (ranked 1st and 2nd on the BEV and 3D leaderboards, respectively) with an ultra-high inference speed. The code is available at https://github.com/Vegeta2020/SE-SSD.