 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene-aware Learning Network for Radar Object Detection
Paper and Code
Jul 03, 2021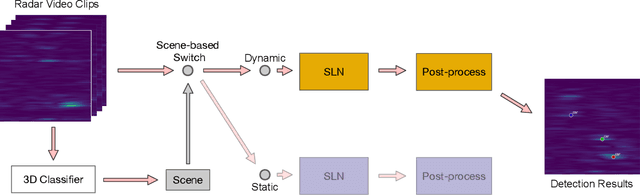
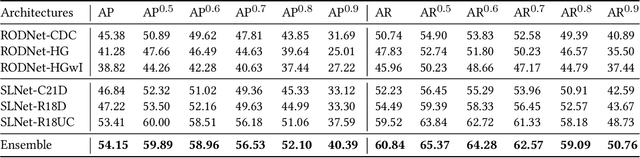
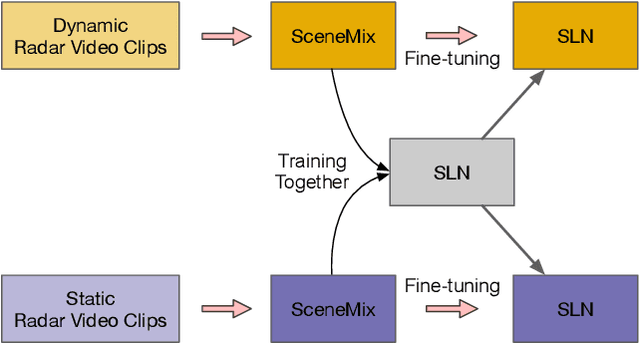

Object detection is essential to safe autonomous or assisted driving. Previous works usually utilize RGB images or LiDAR point clouds to identify and localize multiple objects in self-driving. However, cameras tend to fail in bad driving conditions, e.g. bad weather or weak lighting, while LiDAR scanners are too expensive to get widely deployed in commercial applications. Radar has been drawing more and more attention due to its robustness and low cost. In this paper, we propose a scene-aware radar learning framework for accurate and robust object detection. First, the learning framework contains branches conditioning on the scene category of the radar sequence; with each branch optimized for a specific type of scene. Second, three different 3D autoencoder-based architectures are proposed for radar object detection and ensemble learning is performed over the different architectures to further boost the final performance. Third, we propose novel scene-aware sequence mix augmentation (SceneMix) and scene-specific post-processing to generate more robust detection results. In the ROD2021 Challenge, we achieved a final result of average precision of 75.0% and an average recall of 81.0%. Moreover, in the parking lot scene, our framework ranks first with an average precision of 97.8% and an average recall of 98.6%, which demonstrates the effectiveness of our framework.