 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene-Aware Error Modeling of LiDAR/Visual Odometry for Fusion-based Vehicle Localization
Paper and Code
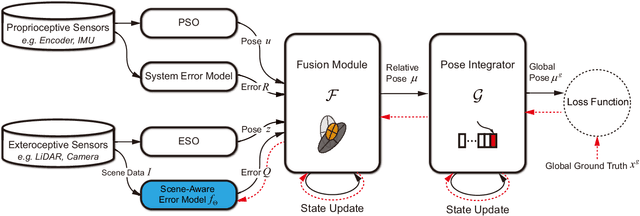
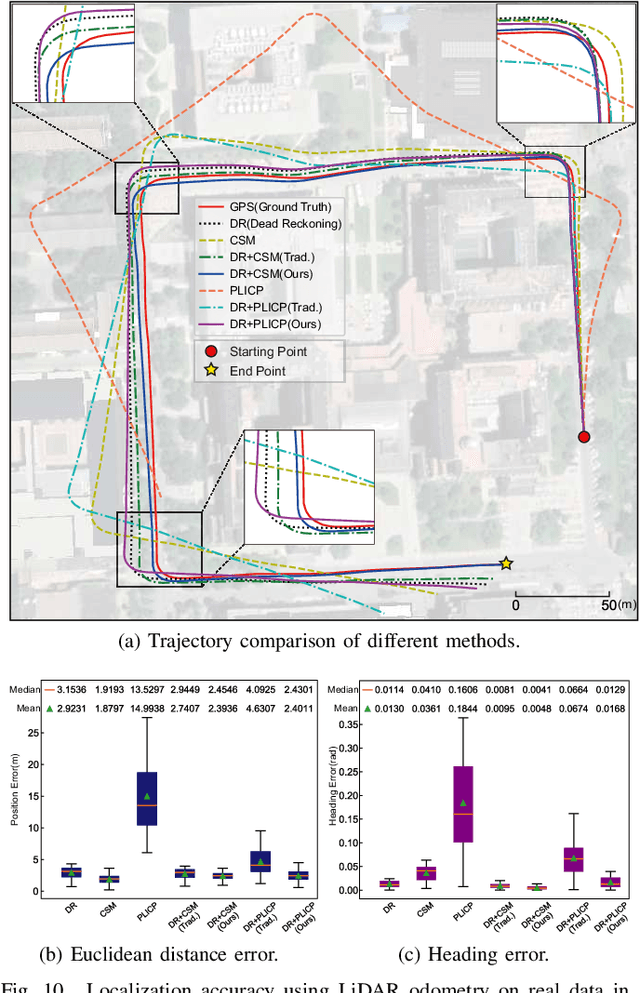
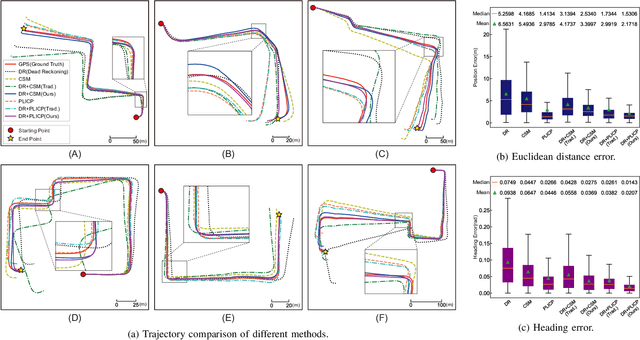
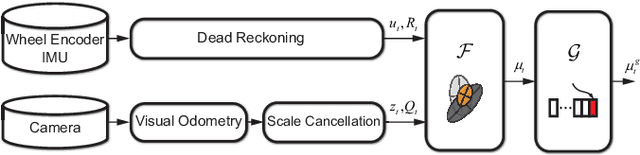
Localization is an essential technique in mobile robotics. In a complex environment, it is necessary to fuse different localization modules to obtain more robust results, in which the error model plays a paramount role. However, exteroceptive sensor-based odometries (ESOs), such as LiDAR/visual odometry, often deliver results with scene-related error, which is difficult to model accurately. To address this problem, this research designs a scene-aware error model for ESO, based on which a multimodal localization fusion framework is developed. In addition, an end-to-end learning method is proposed to train this error model using sparse global poses such as GPS/IMU results. The proposed method is realized for error modeling of LiDAR/visual odometry, and the results are fused with dead reckoning to examine the performance of vehicle localization. Experiments are conducted using both simulation and real-world data of experienced and unexperienced environments, and the experimental results demonstrate that with the learned scene-aware error models, vehicle localization accuracy can be largely improved and shows adaptiveness in unexperienced scenes.