 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Multi-Agent Reinforcement Learning with Selective Parameter Sharing
Paper and Code
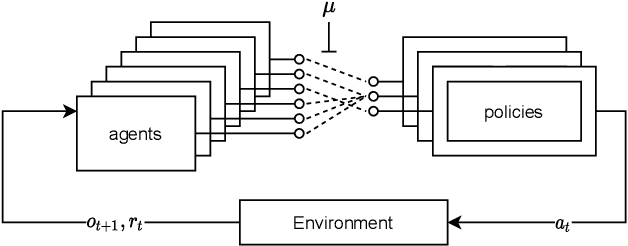
Sharing parameters in multi-agent deep reinforcement learning has played an essential role in allowing algorithms to scale to a large number of agents. Parameter sharing between agents significantly decreases the number of trainable parameters, shortening training times to tractable levels, and has been linked to more efficient learning. However, having all agents share the same parameters can also have a detrimental effect on learning. We demonstrate the impact of parameter sharing methods on training speed and converged returns, establishing that when applied indiscriminately, their effectiveness is highly dependent on the environment. Therefore, we propose a novel method to automatically identify agents which may benefit from sharing parameters by partitioning them based on their abilities and goals. Our approach combines the increased sample efficiency of parameter sharing with the representational capacity of multiple independent networks to reduce training time and increase final returns.