 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScale Estimation of Monocular SfM for a Multi-modal Stereo Camera
Paper and Code
Oct 28, 2018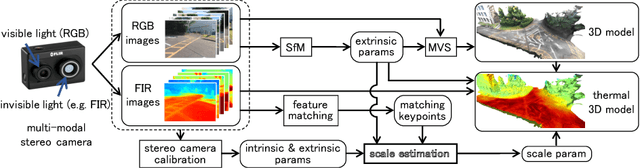
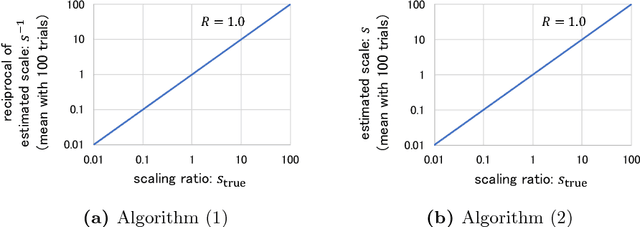
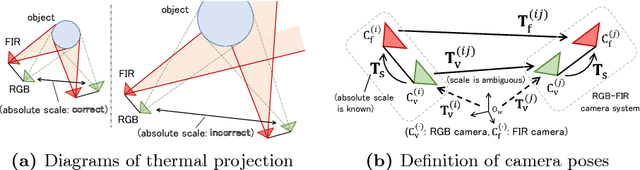
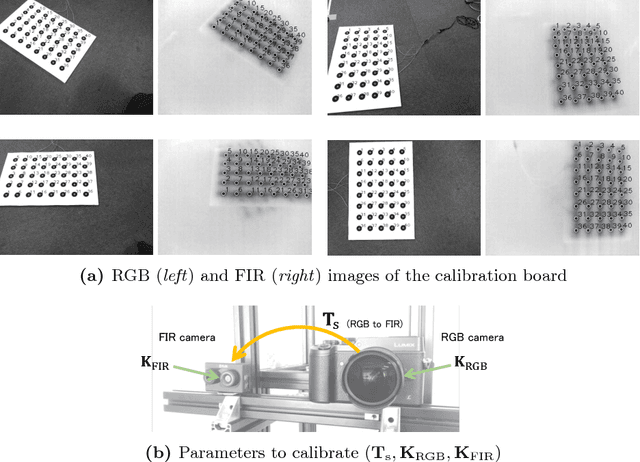
This paper proposes a novel method of estimating the absolute scale of monocular SfM for a multi-modal stereo camera. In the fields of computer vision and robotics, scale estimation for monocular SfM has been widely investigated in order to simplify systems. This paper addresses the scale estimation problem for a stereo camera system in which two cameras capture different spectral images (e.g., RGB and FIR), whose feature points are difficult to directly match using descriptors. Furthermore, the number of matching points between FIR images can be comparatively small, owing to the low resolution and lack of thermal scene texture. To cope with these difficulties, the proposed method estimates the scale parameter using batch optimization, based on the epipolar constraint of a small number of feature correspondences between the invisible light images. The accuracy and numerical stability of the proposed method are verified by synthetic and real image experiments.