 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable End-to-End Autonomous Vehicle Testing via Rare-event Simulation
Paper and Code
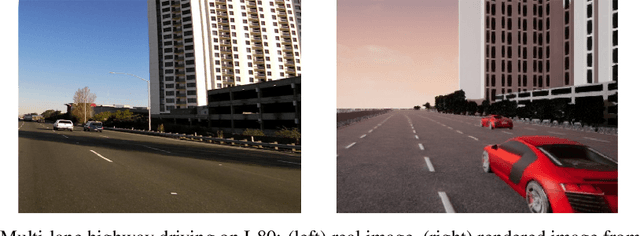

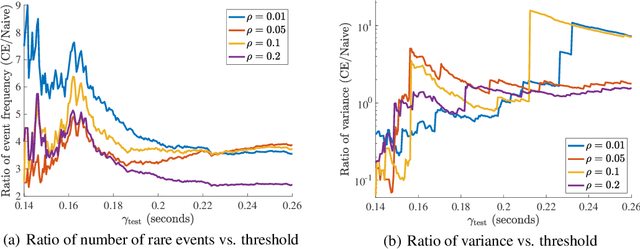

While recent developments in autonomous vehicle (AV) technology highlight substantial progress, we lack tools for rigorous and scalable testing. Real-world testing, the $\textit{de facto}$ evaluation environment, places the public in danger, and, due to the rare nature of accidents, will require billions of miles in order to statistically validate performance claims. We implement a simulation framework that can test an entire modern autonomous driving system, including, in particular, systems that employ deep-learning perception and control algorithms. Using adaptive importance-sampling methods to accelerate rare-event probability evaluation, we estimate the probability of an accident under a base distribution governing standard traffic behavior. We demonstrate our framework on a highway scenario, accelerating system evaluation by $2$-$20$ times over naive Monte Carlo sampling methods and $10$-$300 \mathsf{P}$ times (where $\mathsf{P}$ is the number of processors) over real-world testing.