 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAGE-ICP: Semantic Information-Assisted ICP
Paper and Code
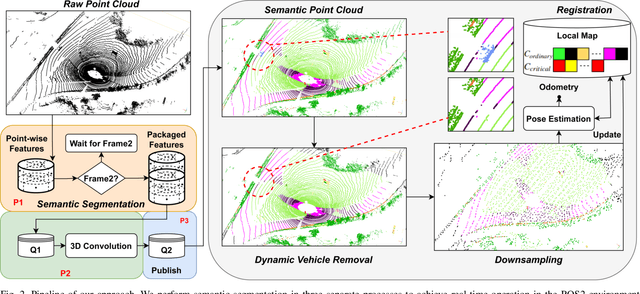
Robust and accurate pose estimation in unknown environments is an essential part of robotic applications. We focus on LiDAR-based point-to-point ICP combined with effective semantic information. This paper proposes a novel semantic information-assisted ICP method named SAGE-ICP, which leverages semantics in odometry. The semantic information for the whole scan is timely and efficiently extracted by a 3D convolution network, and these point-wise labels are deeply involved in every part of the registration, including semantic voxel downsampling, data association, adaptive local map, and dynamic vehicle removal. Unlike previous semantic-aided approaches, the proposed method can improve localization accuracy in large-scale scenes even if the semantic information has certain errors. Experimental evaluations on KITTI and KITTI-360 show that our method outperforms the baseline methods, and improves accuracy while maintaining real-time performance, i.e., runs faster than the sensor frame rate.