Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Reinforcement Learning on Autonomous Vehicles
Paper and Code
Sep 27, 2019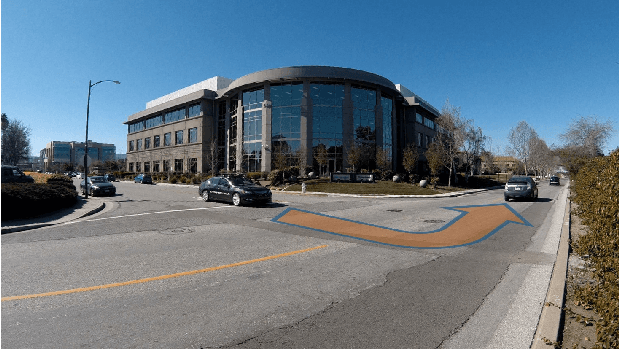
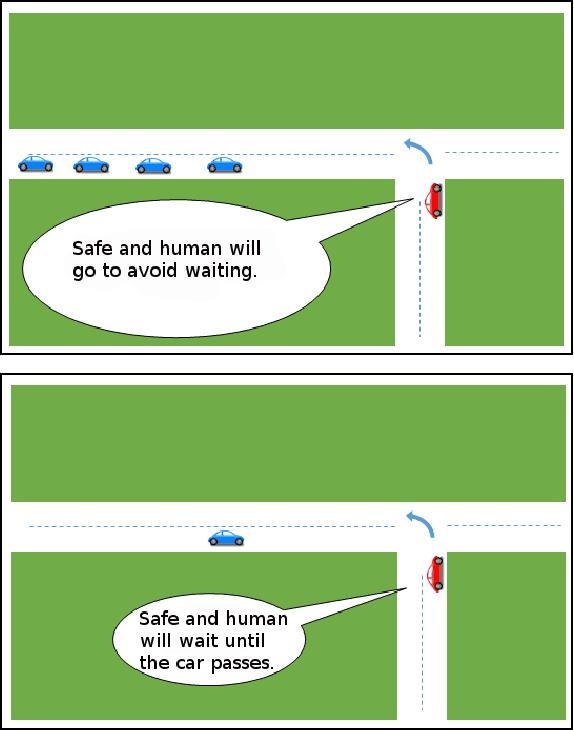
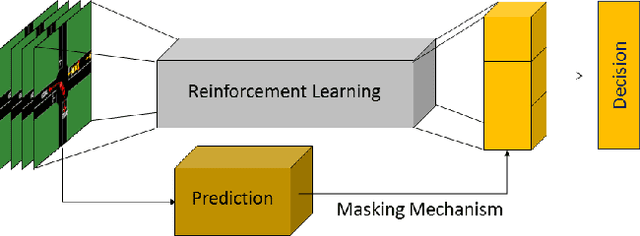
There have been numerous advances in reinforcement learning, but the typically unconstrained exploration of the learning process prevents the adoption of these methods in many safety critical applications. Recent work in safe reinforcement learning uses idealized models to achieve their guarantees, but these models do not easily accommodate the stochasticity or high-dimensionality of real world systems. We investigate how prediction provides a general and intuitive framework to constraint exploration, and show how it can be used to safely learn intersection handling behaviors on an autonomous vehicle.
* IROS 2018
View paper on