 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Reinforcement Learning From Pixels Using a Stochastic Latent Representation
Paper and Code
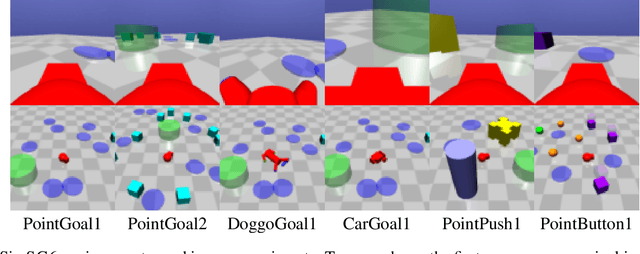
We address the problem of safe reinforcement learning from pixel observations. Inherent challenges in such settings are (1) a trade-off between reward optimization and adhering to safety constraints, (2) partial observability, and (3) high-dimensional observations. We formalize the problem in a constrained, partially observable Markov decision process framework, where an agent obtains distinct reward and safety signals. To address the curse of dimensionality, we employ a novel safety critic using the stochastic latent actor-critic (SLAC) approach. The latent variable model predicts rewards and safety violations, and we use the safety critic to train safe policies. Using well-known benchmark environments, we demonstrate competitive performance over existing approaches with respects to computational requirements, final reward return, and satisfying the safety constraints.