 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe, Passive Control for Mechanical Systems with Application to Physical Human-Robot Interactions
Paper and Code
Nov 03, 2020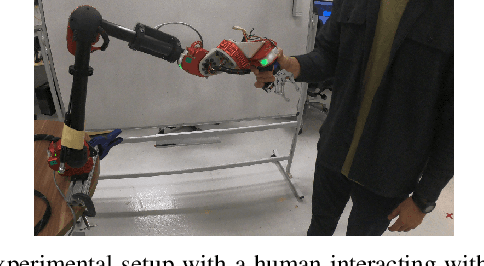
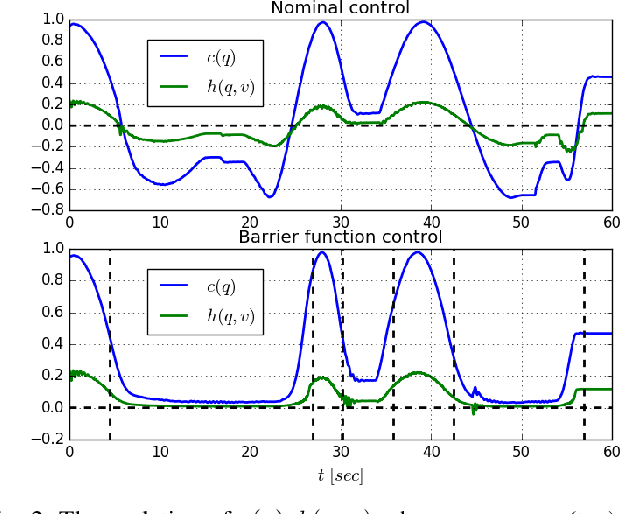
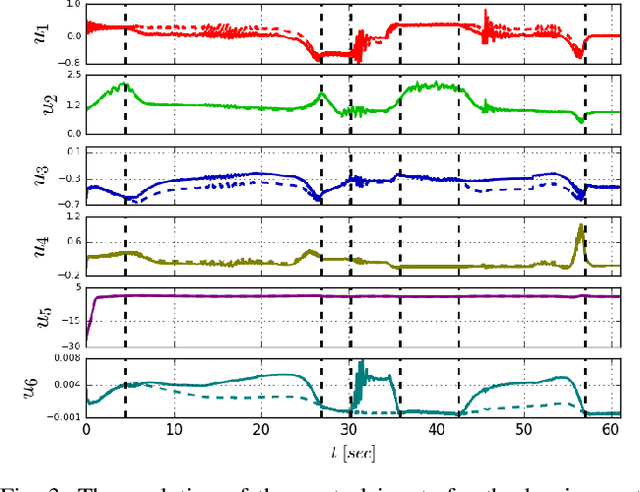
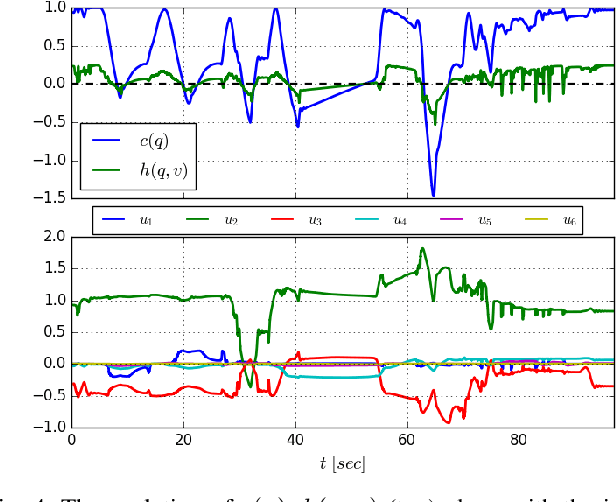
In this paper, we propose a novel safe, passive, and robust control law for mechanical systems. The proposed approach addresses safety from a physical human-robot interaction perspective, where a robot must not only stay inside a pre-defined region, but respect velocity constraints and ensure passivity with respect to external perturbations that may arise from a human or the environment. The proposed control is written in closed-form, behaves well even during singular configurations, and allows any nominal control law to be applied inside the operating region as long as the safety requirements (e.g., velocity) are adhered to. The proposed method is implemented on a 6-DOF robot to demonstrate its effectiveness during a physical human-robot interaction task.