 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Local Exploration for Replanning in Cluttered Unknown Environments for Micro-Aerial Vehicles
Paper and Code
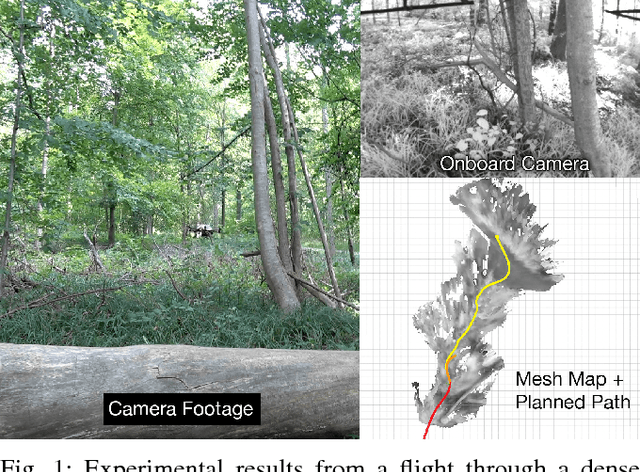
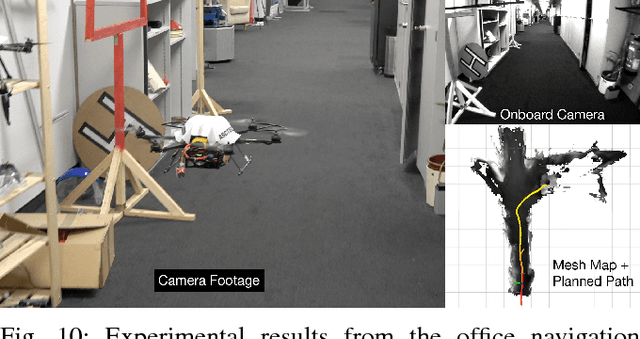
In order to enable Micro-Aerial Vehicles (MAVs) to assist in complex, unknown, unstructured environments, they must be able to navigate with guaranteed safety, even when faced with a cluttered environment they have no prior knowledge of. While trajectory optimization-based local planners have been shown to perform well in these cases, prior work either does not address how to deal with local minima in the optimization problem, or solves it by using an optimistic global planner. We present a conservative trajectory optimization-based local planner, coupled with a local exploration strategy that selects intermediate goals. We perform extensive simulations to show that this system performs better than the standard approach of using an optimistic global planner, and also outperforms doing a single exploration step when the local planner is stuck. The method is validated through experiments in a variety of highly cluttered environments including a dense forest. These experiments show the complete system running in real time fully onboard an MAV, mapping and replanning at 4 Hz.