 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Human-Interactive Control via Shielding
Paper and Code
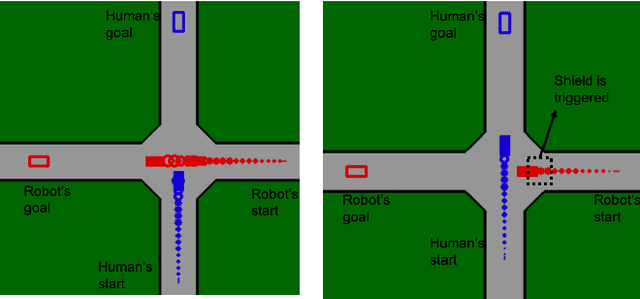
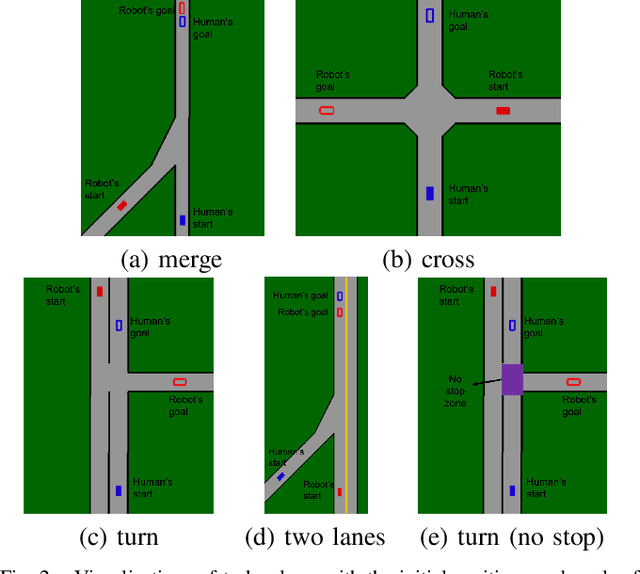
Ensuring safety for human-interactive robotics is important due to the potential for human injury. The key challenge is defining safety in a way that accounts for the complex range of human behaviors without modeling the human as an unconstrained adversary. We propose a novel approach to ensuring safety in these settings. Our approach focuses on defining backup actions that we believe human always considers taking to avoid an accident -- e.g., brake to avoid rear-ending the other agent. Given such a definition, we consider a safety constraint that guarantees safety as long as the human takes the appropriate backup actions when necessary to ensure safety. Then, we propose an algorithm that overrides an arbitrary given controller as needed to ensure that the robot is safe. We evaluate our approach in a simulated environment, interacting with both real and simulated humans.