Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS-BEV: Semantic Birds-Eye View Representation for Weather and Lighting Invariant 3-DoF Localization
Paper and Code
Jan 23, 2021
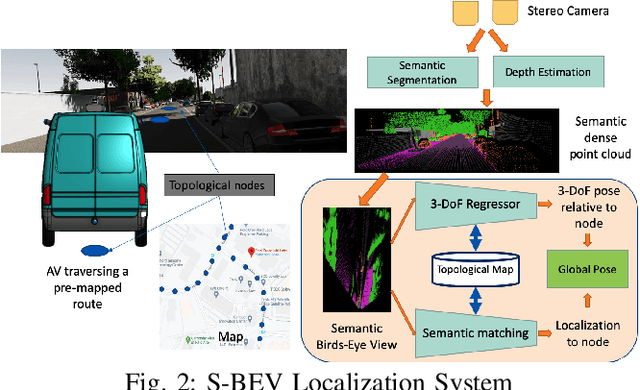
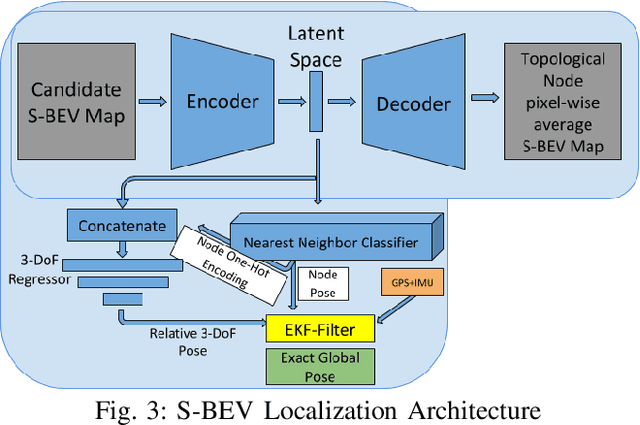

We describe a light-weight, weather and lighting invariant, Semantic Bird's Eye View (S-BEV) signature for vision-based vehicle re-localization. A topological map of S-BEV signatures is created during the first traversal of the route, which are used for coarse localization in subsequent route traversal. A fine-grained localizer is then trained to output the global 3-DoF pose of the vehicle using its S-BEV and its coarse localization. We conduct experiments on vKITTI2 virtual dataset and show the potential of the S-BEV to be robust to weather and lighting. We also demonstrate results with 2 vehicles on a 22 km long highway route in the Ford AV dataset.
* 7 pages, 8 figures
View paper on