 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRTM3D: Real-time Monocular 3D Detection from Object Keypoints for Autonomous Driving
Paper and Code
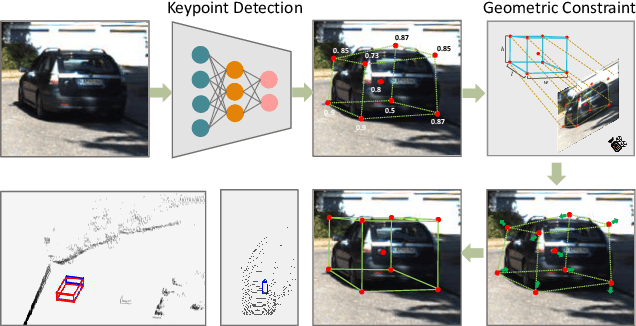
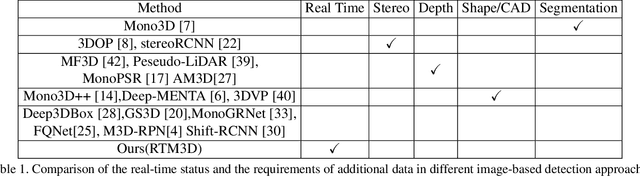
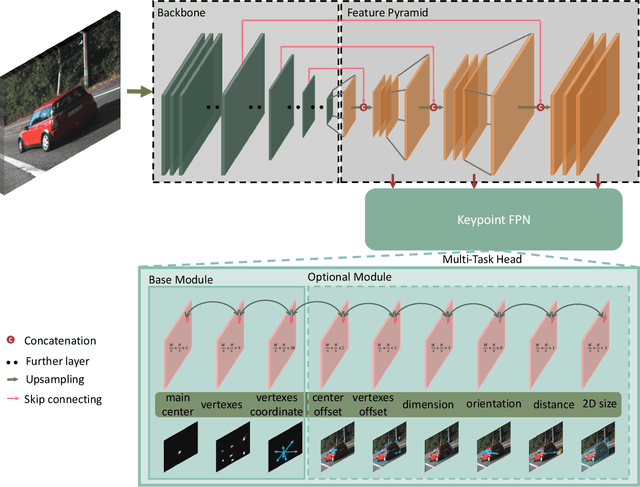
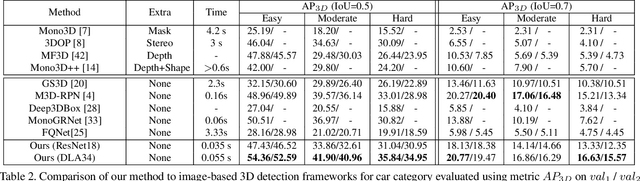
In this work, we propose an efficient and accurate monocular 3D detection framework in single shot. Most successful 3D detectors take the projection constraint from the 3D bounding box to the 2D box as an important component. Four edges of a 2D box provide only four constraints and the performance deteriorates dramatically with the small error of the 2D detector. Different from these approaches, our method predicts the nine perspective keypoints of a 3D bounding box in image space, and then utilize the geometric relationship of 3D and 2D perspectives to recover the dimension, location, and orientation in 3D space. In this method, the properties of the object can be predicted stably even when the estimation of keypoints is very noisy, which enables us to obtain fast detection speed with a small architecture. Training our method only uses the 3D properties of the object without the need for external networks or supervision data. Our method is the first real-time system for monocular image 3D detection while achieves state-of-the-art performance on the KITTI benchmark. Code will be released at https://github.com/Banconxuan/RTM3D.