 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRotation Group Synchronization via Quotient Manifold
Paper and Code
Jun 22, 2023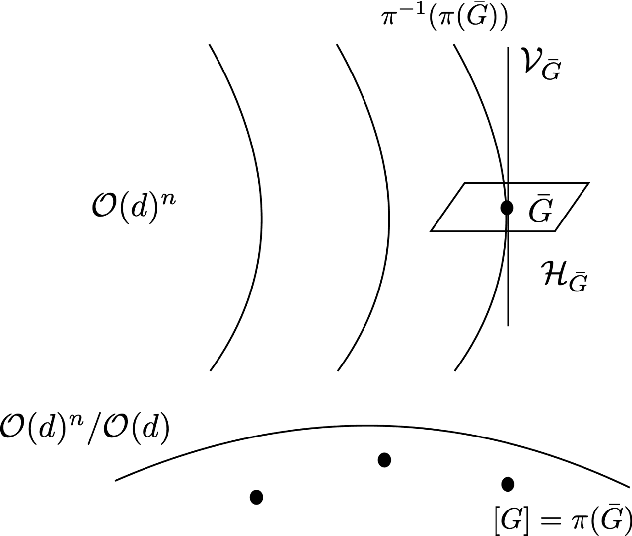
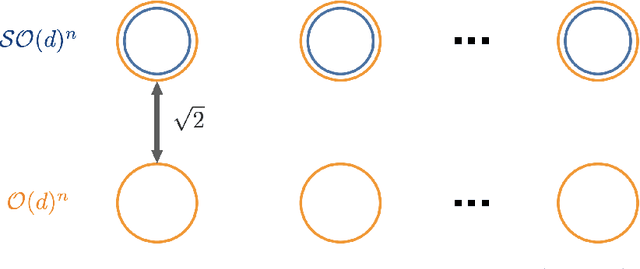
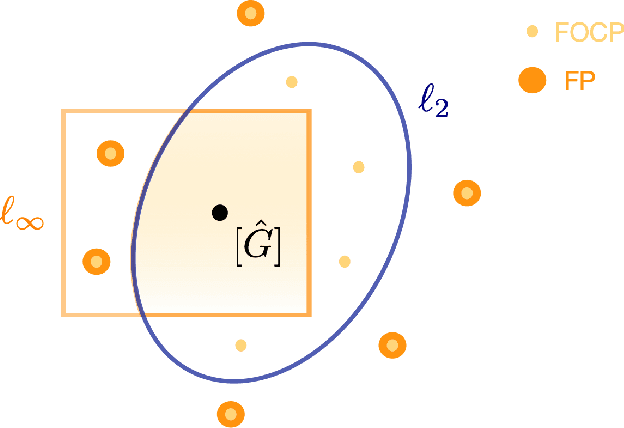
Rotation group $\mathcal{SO}(d)$ synchronization is an important inverse problem and has attracted intense attention from numerous application fields such as graph realization, computer vision, and robotics. In this paper, we focus on the least-squares estimator of rotation group synchronization with general additive noise models, which is a nonconvex optimization problem with manifold constraints. Unlike the phase/orthogonal group synchronization, there are limited provable approaches for solving rotation group synchronization. First, we derive improved estimation results of the least-squares/spectral estimator, illustrating the tightness and validating the existing relaxation methods of solving rotation group synchronization through the optimum of relaxed orthogonal group version under near-optimal noise level for exact recovery. Moreover, departing from the standard approach of utilizing the geometry of the ambient Euclidean space, we adopt an intrinsic Riemannian approach to study orthogonal/rotation group synchronization. Benefiting from a quotient geometric view, we prove the positive definite condition of quotient Riemannian Hessian around the optimum of orthogonal group synchronization problem, and consequently the Riemannian local error bound property is established to analyze the convergence rate properties of various Riemannian algorithms. As a simple and feasible method, the sequential convergence guarantee of the (quotient) Riemannian gradient method for solving orthogonal/rotation group synchronization problem is studied, and we derive its global linear convergence rate to the optimum with the spectral initialization. All results are deterministic without any probabilistic model.