 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROSEFusion: Random Optimization for Online Dense Reconstruction under Fast Camera Motion
Paper and Code
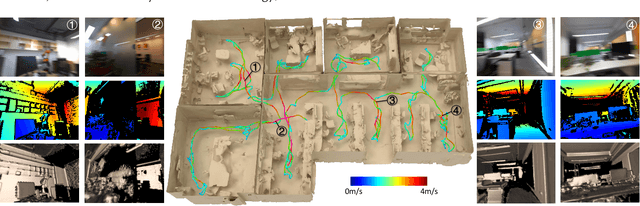
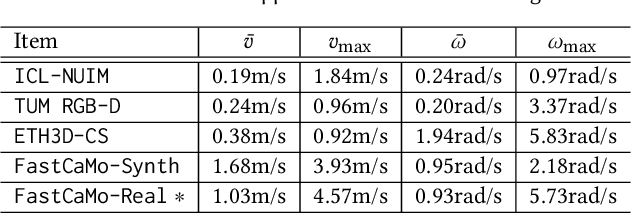
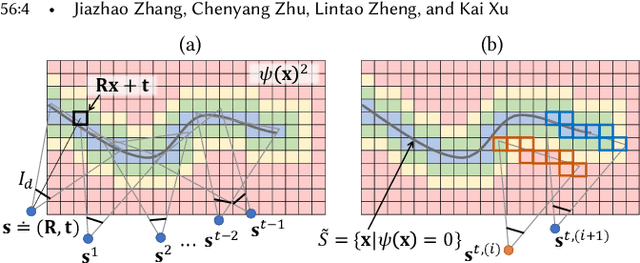
Online reconstruction based on RGB-D sequences has thus far been restrained to relatively slow camera motions (<1m/s). Under very fast camera motion (e.g., 3m/s), the reconstruction can easily crumble even for the state-of-the-art methods. Fast motion brings two challenges to depth fusion: 1) the high nonlinearity of camera pose optimization due to large inter-frame rotations and 2) the lack of reliably trackable features due to motion blur. We propose to tackle the difficulties of fast-motion camera tracking in the absence of inertial measurements using random optimization, in particular, the Particle Filter Optimization (PFO). To surmount the computation-intensive particle sampling and update in standard PFO, we propose to accelerate the randomized search via updating a particle swarm template (PST). PST is a set of particles pre-sampled uniformly within the unit sphere in the 6D space of camera pose. Through moving and rescaling the pre-sampled PST guided by swarm intelligence, our method is able to drive tens of thousands of particles to locate and cover a good local optimum extremely fast and robustly. The particles, representing candidate poses, are evaluated with a fitness function defined based on depth-model conformance. Therefore, our method, being depth-only and correspondence-free, mitigates the motion blur impediment as ToF-based depths are often resilient to motion blur. Thanks to the efficient template-based particle set evolution and the effective fitness function, our method attains good quality pose tracking under fast camera motion (up to 4m/s) in a realtime framerate without including loop closure or global pose optimization. Through extensive evaluations on public datasets of RGB-D sequences, especially on a newly proposed benchmark of fast camera motion, we demonstrate the significant advantage of our method over the state of the arts.