 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRolling Colors: Adversarial Laser Exploits against Traffic Light Recognition
Paper and Code
Apr 06, 2022
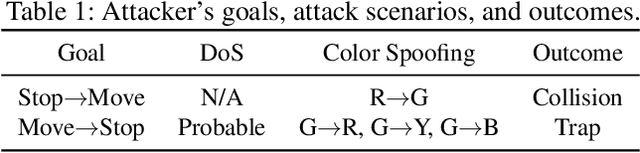

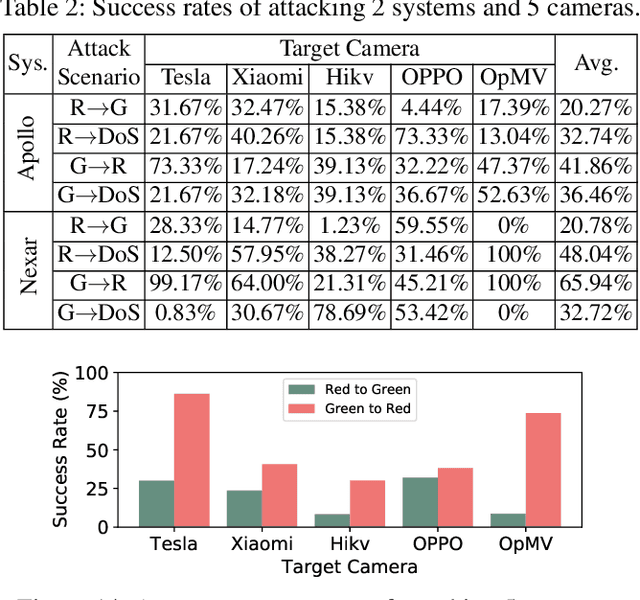
Traffic light recognition is essential for fully autonomous driving in urban areas. In this paper, we investigate the feasibility of fooling traffic light recognition mechanisms by shedding laser interference on the camera. By exploiting the rolling shutter of CMOS sensors, we manage to inject a color stripe overlapped on the traffic light in the image, which can cause a red light to be recognized as a green light or vice versa. To increase the success rate, we design an optimization method to search for effective laser parameters based on empirical models of laser interference. Our evaluation in emulated and real-world setups on 2 state-of-the-art recognition systems and 5 cameras reports a maximum success rate of 30% and 86.25% for Red-to-Green and Green-to-Red attacks. We observe that the attack is effective in continuous frames from more than 40 meters away against a moving vehicle, which may cause end-to-end impacts on self-driving such as running a red light or emergency stop. To mitigate the threat, we propose redesigning the rolling shutter mechanism.