 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustness to Adversarial Attacks in Learning-Enabled Controllers
Paper and Code
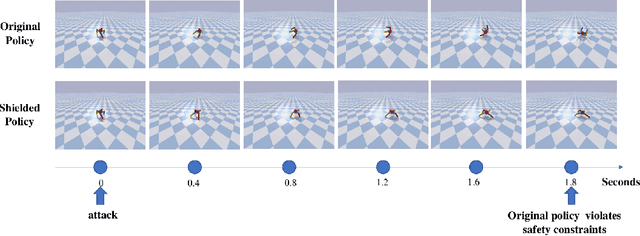

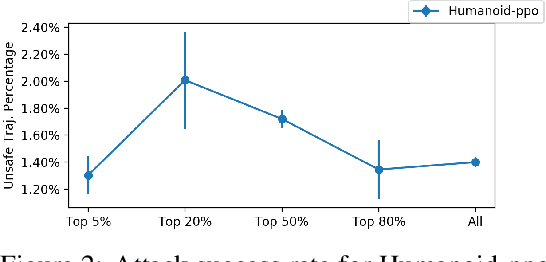

Learning-enabled controllers used in cyber-physical systems (CPS) are known to be susceptible to adversarial attacks. Such attacks manifest as perturbations to the states generated by the controller's environment in response to its actions. We consider state perturbations that encompass a wide variety of adversarial attacks and describe an attack scheme for discovering adversarial states. To be useful, these attacks need to be natural, yielding states in which the controller can be reasonably expected to generate a meaningful response. We consider shield-based defenses as a means to improve controller robustness in the face of such perturbations. Our defense strategy allows us to treat the controller and environment as black-boxes with unknown dynamics. We provide a two-stage approach to construct this defense and show its effectiveness through a range of experiments on realistic continuous control domains such as the navigation control-loop of an F16 aircraft and the motion control system of humanoid robots.