 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustness of Object Detectors in Degrading Weather Conditions
Paper and Code
Jun 16, 2021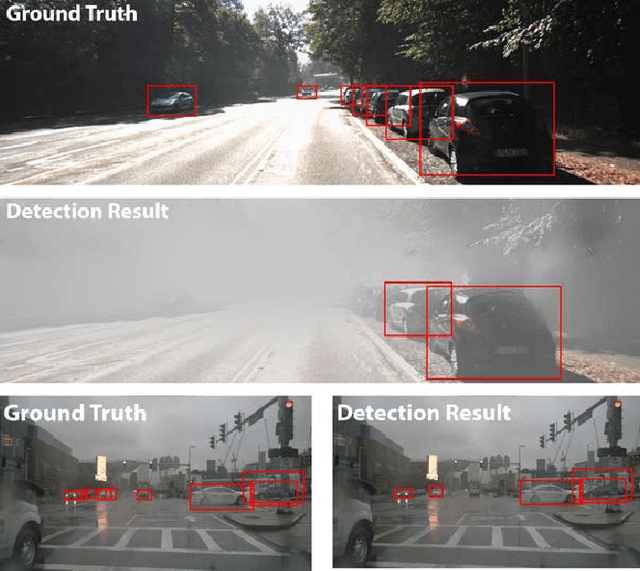
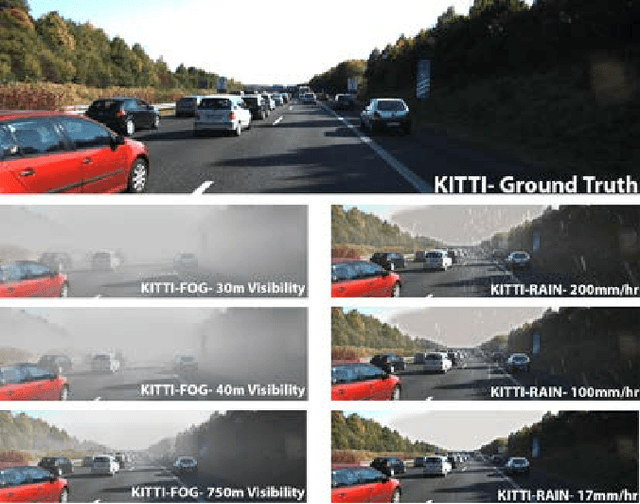
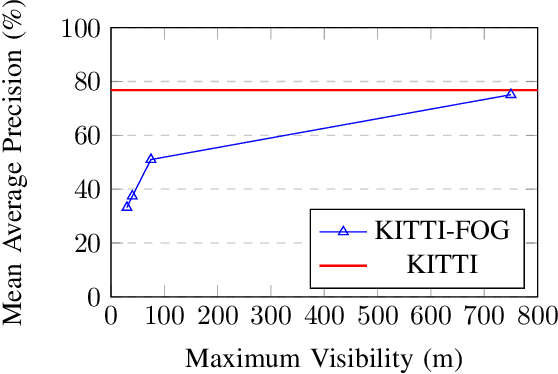
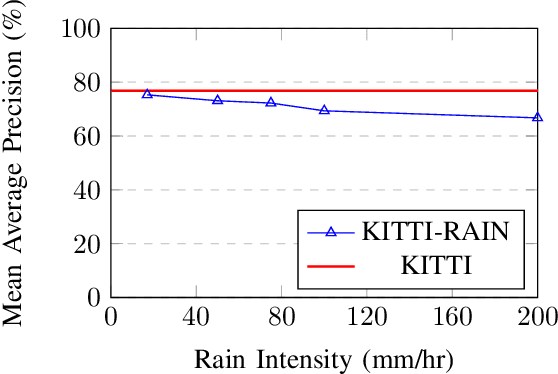
State-of-the-art object detection systems for autonomous driving achieve promising results in clear weather conditions. However, such autonomous safety critical systems also need to work in degrading weather conditions, such as rain, fog and snow. Unfortunately, most approaches evaluate only on the KITTI dataset, which consists only of clear weather scenes. In this paper we address this issue and perform one of the most detailed evaluation on single and dual modality architectures on data captured in real weather conditions. We analyse the performance degradation of these architectures in degrading weather conditions. We demonstrate that an object detection architecture performing good in clear weather might not be able to handle degrading weather conditions. We also perform ablation studies on the dual modality architectures and show their limitations.