 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Safe Control with Multi-Modal Uncertainty
Paper and Code
Sep 28, 2023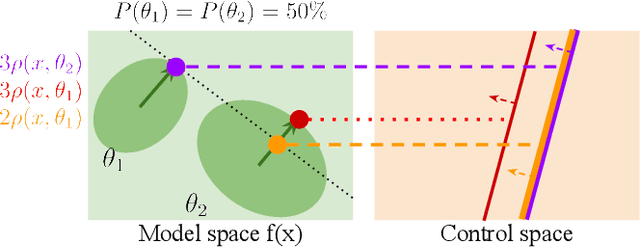
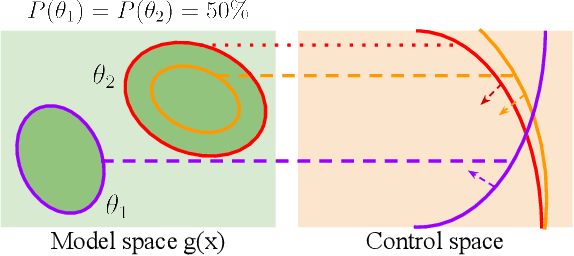
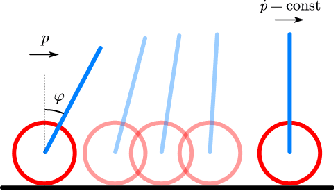
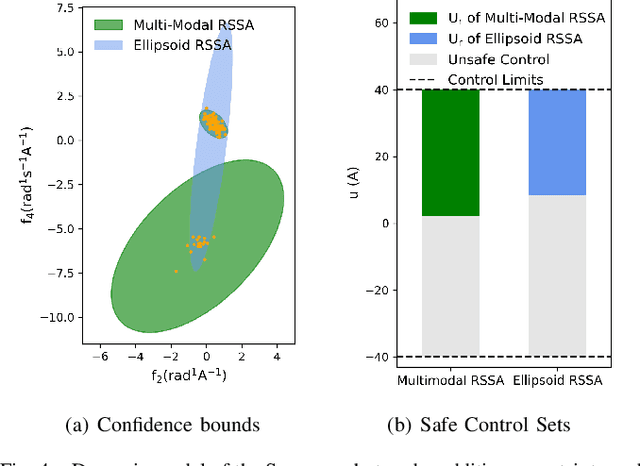
Safety in dynamic systems with prevalent uncertainties is crucial. Current robust safe controllers, designed primarily for uni-modal uncertainties, may be either overly conservative or unsafe when handling multi-modal uncertainties. To address the problem, we introduce a novel framework for robust safe control, tailored to accommodate multi-modal Gaussian dynamics uncertainties and control limits. We first present an innovative method for deriving the least conservative robust safe control under additive multi-modal uncertainties. Next, we propose a strategy to identify a locally least-conservative robust safe control under multiplicative uncertainties. Following these, we introduce a unique safety index synthesis method. This provides the foundation for a robust safe controller that ensures a high probability of realizability under control limits and multi-modal uncertainties. Experiments on a simulated Segway validate our approach, showing consistent realizability and less conservatism than controllers designed using uni-modal uncertainty methods. The framework offers significant potential for enhancing safety and performance in robotic applications.