Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Reinforcement Learning under model misspecification
Paper and Code
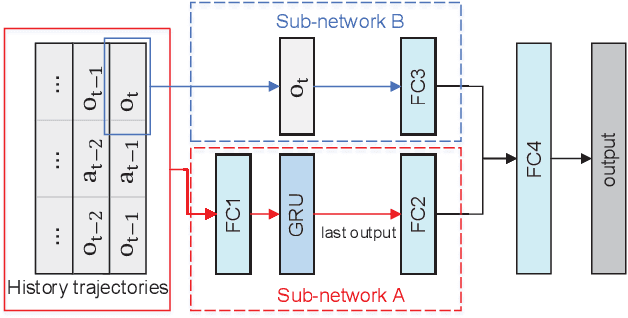
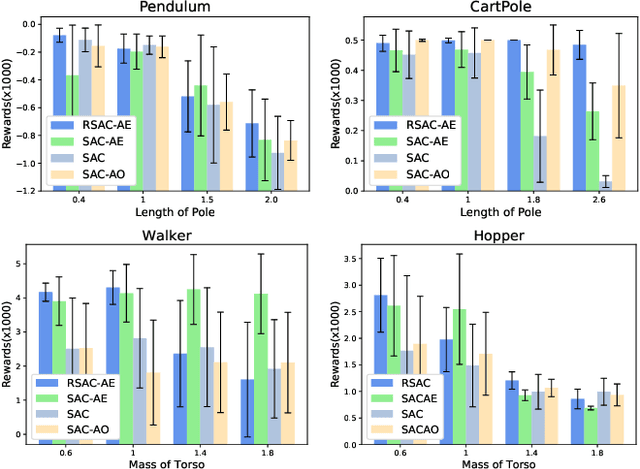
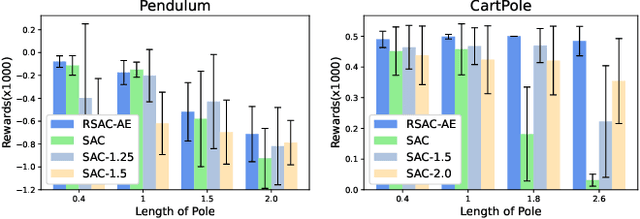
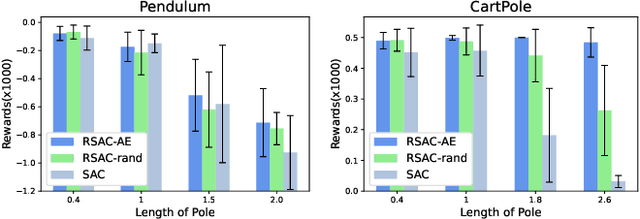
Reinforcement learning has achieved remarkable performance in a wide range of tasks these days. Nevertheless, some unsolved problems limit its applications in real-world control. One of them is model misspecification, a situation where an agent is trained and deployed in environments with different transition dynamics. We propose an novel framework that utilize history trajectory and Partial Observable Markov Decision Process Modeling to deal with this dilemma. Additionally, we put forward an efficient adversarial attack method to assist robust training. Our experiments in four gym domains validate the effectiveness of our framework.
View paper on