 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Online Control with Model Misspecification
Paper and Code
Jul 16, 2021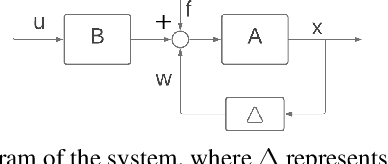
We study online control of an unknown nonlinear dynamical system that is approximated by a time-invariant linear system with model misspecification. Our study focuses on robustness, which measures how much deviation from the assumed linear approximation can be tolerated while maintaining a bounded $\ell_2$-gain compared to the optimal control in hindsight. Some models cannot be stabilized even with perfect knowledge of their coefficients: the robustness is limited by the minimal distance between the assumed dynamics and the set of unstabilizable dynamics. Therefore it is necessary to assume a lower bound on this distance. Under this assumption, and with full observation of the $d$ dimensional state, we describe an efficient controller that attains $\Omega(\frac{1}{\sqrt{d}})$ robustness together with an $\ell_2$-gain whose dimension dependence is near optimal. We also give an inefficient algorithm that attains constant robustness independent of the dimension, with a finite but sub-optimal $\ell_2$-gain.