 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Multi-Robot Optimal Path Planning with Temporal Logic Constraints
Paper and Code
Jul 10, 2012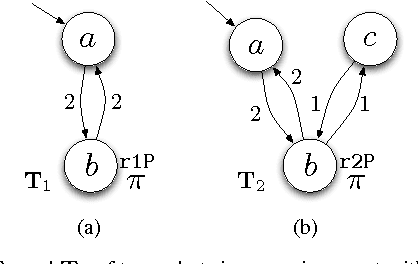
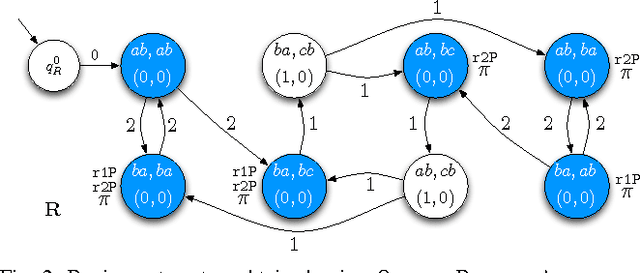

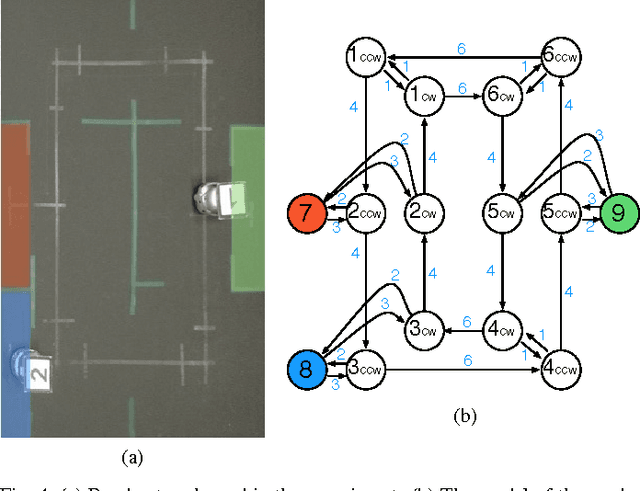
In this paper we present a method for automatically planning robust optimal paths for a group of robots that satisfy a common high level mission specification. Each robot's motion in the environment is modeled as a weighted transition system, and the mission is given as a Linear Temporal Logic (LTL) formula over a set of propositions satisfied by the regions of the environment. In addition, an optimizing proposition must repeatedly be satisfied. The goal is to minimize the maximum time between satisfying instances of the optimizing proposition while ensuring that the LTL formula is satisfied even with uncertainty in the robots' traveling times. We characterize a class of LTL formulas that are robust to robot timing errors, for which we generate optimal paths if no timing errors are present, and we present bounds on the deviation from the optimal values in the presence of errors. We implement and experimentally evaluate our method considering a persistent monitoring task in a road network environment.