 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Localization with Bounded Noise: Creating a Superset of the Possible Target Positions via Linear-Fractional Representations
Paper and Code
Oct 06, 2021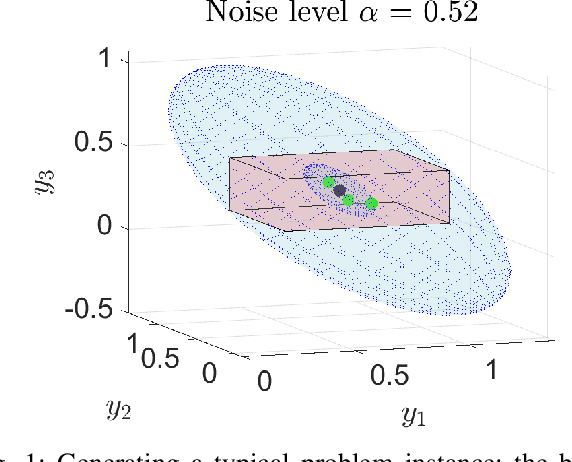
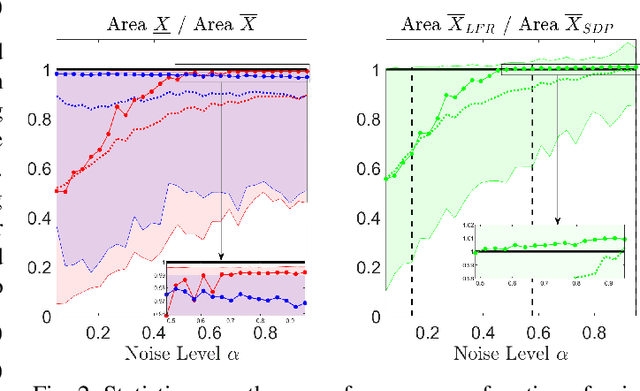
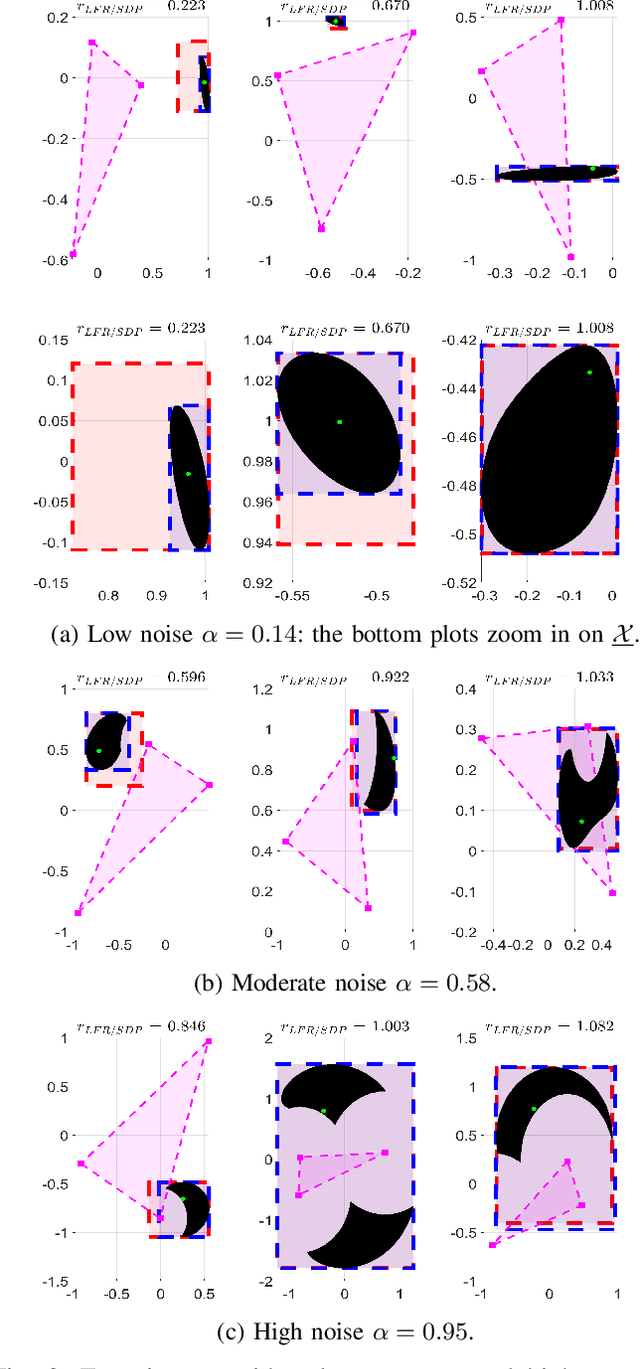
Locating an object is key in many applications, namely in high-stakes real-world scenarios, like detecting humans or obstacles in vehicular networks. In such applications, pointwise estimates are not enough, and the full area of locations compatible with acquired measurements should be available, for robust and safe navigation. This paper presents a scalable algorithm for creating a superset of all possible target locations, given range measurements with bounded error. The assumption of bounded error is mild, since both hardware characteristics and application scenario impose upper bounds on measurement errors, and the bounded set can be taken from confidence regions of the error distributions. We construct the superset through convex relaxations that use Linear Fractional Representations (LFRs), a well-known technique in robust control. Additionally, we also provide a statistical interpretation for the set of possible target positions, considering the framework of robust estimation. Finally, we provide empirical validation by comparing our LFR method with a standard semidefinite relaxation. Our approach has shown to pay off for small to moderate noise levels: the supersets created by our method are tighter than the benchmark ones being about 20% smaller in size. Furthermore, our method tends to be tight because the size of the supersets is, on median terms, within a 3% margin of a lower bound computed via grid search.