 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Learning-based Predictive Control for Constrained Nonlinear Systems
Paper and Code
Nov 22, 2019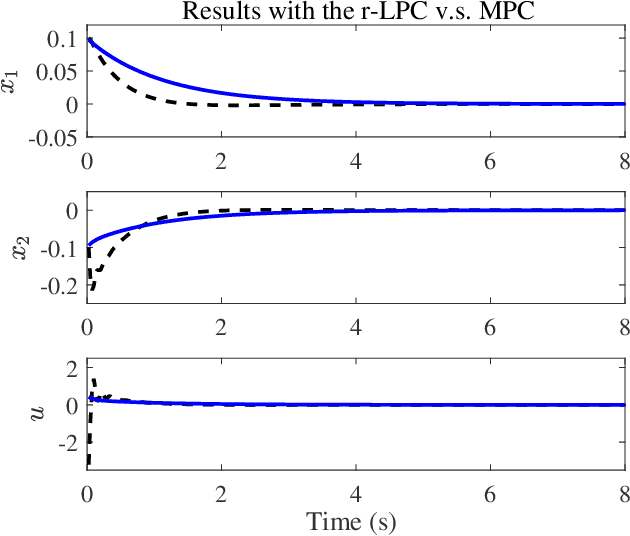

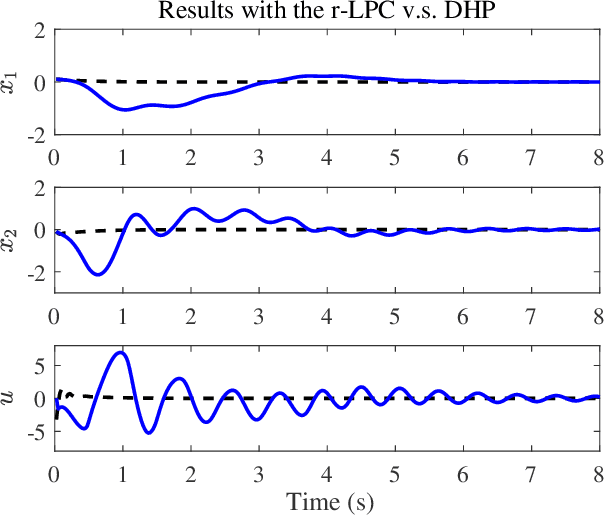
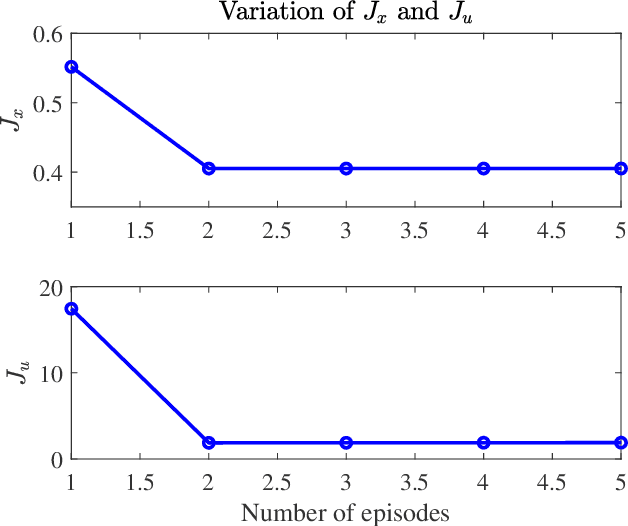
The integration of machine learning methods and Model Predictive Control (MPC) has received increasing attention in recent years. In general, learning-based predictive control (LPC) is promising to build data-driven models and solve the online optimization problem with lower computational costs. However, the robustness of LPC is difficult to be guaranteed since there will be uncertainties due to function approximation used in machine learning algorithms. In this paper, a novel robust learning-based predictive control (r-LPC) scheme is proposed for constrained nonlinear systems with unknown dynamics. In r-LPC, the Koopman operator is used to form a global linear representation of the unknown dynamics, and an incremental actor-critic algorithm is presented for receding horizon optimization. To realize the satisfaction of system constraints, soft logarithmic barrier functions are designed within the learning predictive framework. The recursive feasibility and stability of the closed-loop system are discussed under the convergence arguments of the approximation algorithms adopted. Also, the robustness property of r-LPC is analyzed theoretically by taking into consideration the existence of perturbations on the controller due to possible approximation errors. Simulation results with the proposed learning control approach for the data-driven regulation of a Van der Pol oscillator system have been reported, including the comparisons with a classic MPC and an infinite-horizon Dual Heuristic Programming (DHP) algorithm. The results show that the r-LPC significantly outperforms the DHP algorithm in terms of control performance and can be comparative to the MPC in terms of regulating control as well as energy consumption. Moreover, its average computational cost is much smaller than that with the MPC in the adopted environment.