 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust In-Hand Manipulation with Extrinsic Contacts
Paper and Code
Mar 27, 2024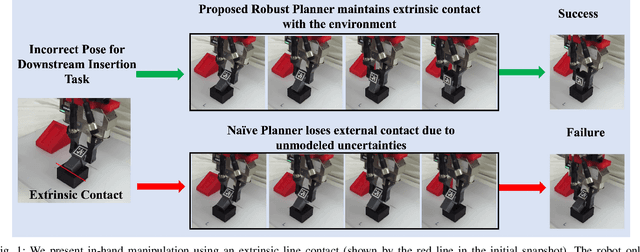
We present in-hand manipulation tasks where a robot moves an object in grasp, maintains its external contact mode with the environment, and adjusts its in-hand pose simultaneously. The proposed manipulation task leads to complex contact interactions which can be very susceptible to uncertainties in kinematic and physical parameters. Therefore, we propose a robust in-hand manipulation method, which consists of two parts. First, an in-gripper mechanics model that computes a na\"ive motion cone assuming all parameters are precise. Then, a robust planning method refines the motion cone to maintain desired contact mode regardless of parametric errors. Real-world experiments were conducted to illustrate the accuracy of the mechanics model and the effectiveness of the robust planning framework in the presence of kinematics parameter errors.