 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Generative Adversarial Imitation Learning via Local Lipschitzness
Paper and Code
Jun 30, 2021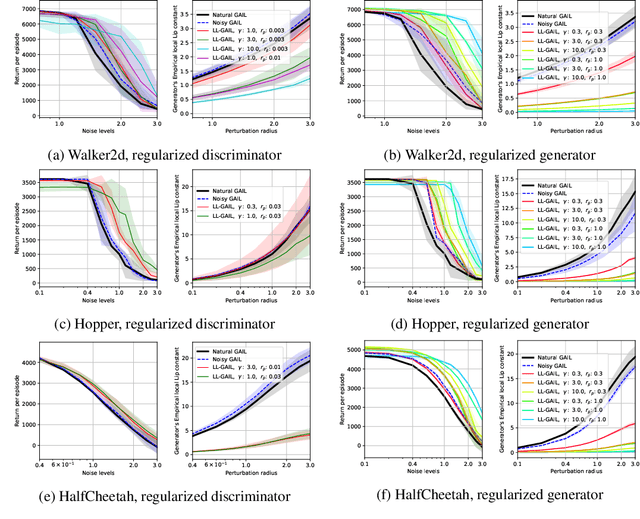
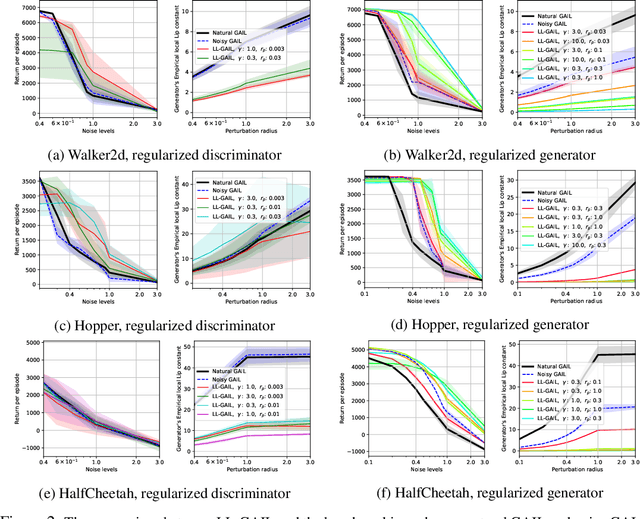
We explore methodologies to improve the robustness of generative adversarial imitation learning (GAIL) algorithms to observation noise. Towards this objective, we study the effect of local Lipschitzness of the discriminator and the generator on the robustness of policies learned by GAIL. In many robotics applications, the learned policies by GAIL typically suffer from a degraded performance at test time since the observations from the environment might be corrupted by noise. Hence, robustifying the learned policies against the observation noise is of critical importance. To this end, we propose a regularization method to induce local Lipschitzness in the generator and the discriminator of adversarial imitation learning methods. We show that the modified objective leads to learning significantly more robust policies. Moreover, we demonstrate -- both theoretically and experimentally -- that training a locally Lipschitz discriminator leads to a locally Lipschitz generator, thereby improving the robustness of the resultant policy. We perform extensive experiments on simulated robot locomotion environments from the MuJoCo suite that demonstrate the proposed method learns policies that significantly outperform the state-of-the-art generative adversarial imitation learning algorithm when applied to test scenarios with noise-corrupted observations.