 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Environment Perception for Automated Driving: A Unified Learning Pipeline for Visual-Infrared Object Detection
Paper and Code
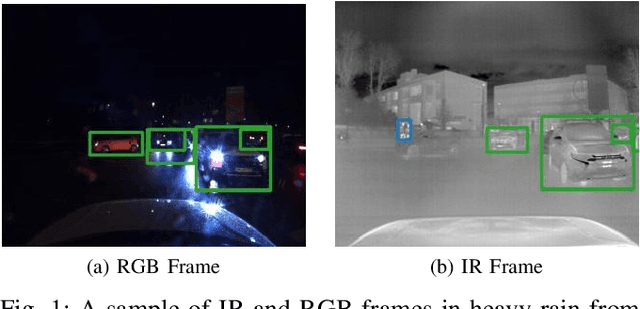
The RGB complementary metal-oxidesemiconductor (CMOS) sensor works within the visible light spectrum. Therefore it is very sensitive to environmental light conditions. On the contrary, a long-wave infrared (LWIR) sensor operating in 8-14 micro meter spectral band, functions independent of visible light. In this paper, we exploit both visual and thermal perception units for robust object detection purposes. After delicate synchronization and (cross-) labeling of the FLIR [1] dataset, this multi-modal perception data passes through a convolutional neural network (CNN) to detect three critical objects on the road, namely pedestrians, bicycles, and cars. After evaluation of RGB and infrared (thermal and infrared are often used interchangeably) sensors separately, various network structures are compared to fuse the data at the feature level effectively. Our RGB-thermal (RGBT) fusion network, which takes advantage of a novel entropy-block attention module (EBAM), outperforms the state-of-the-art network [2] by 10% with 82.9% mAP.