 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust 6D Object Pose Estimation by Learning RGB-D Features
Paper and Code


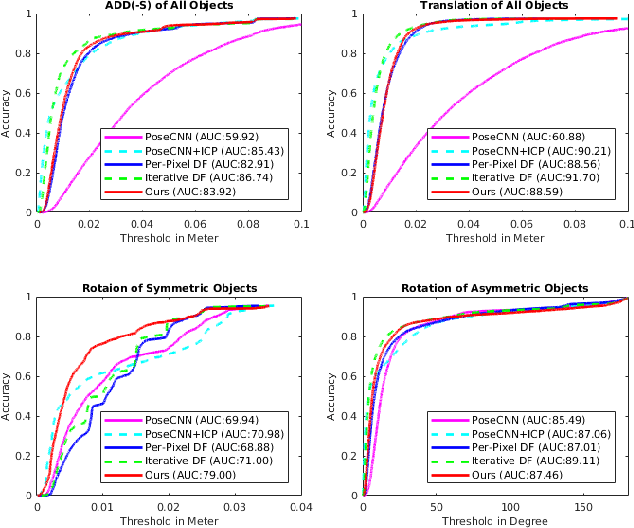
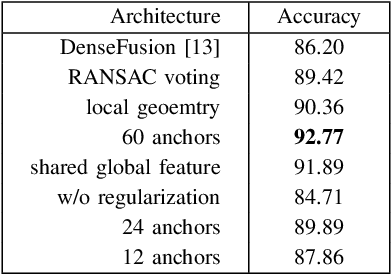
Accurate 6D object pose estimation is fundamental to robotic manipulation and grasping. Previous methods follow a local optimization approach which minimizes the distance between closest point pairs to handle the rotation ambiguity of symmetric objects. In this work, we propose a novel discrete-continuous formulation for rotation regression to resolve this local-optimum problem. We uniformly sample rotation anchors in SO(3), and predict a constrained deviation from each anchor to the target, as well as uncertainty scores for selecting the best prediction. Additionally, the object location is detected by aggregating point-wise vectors pointing to the 3D center. Experiments on two benchmarks: LINEMOD and YCB-Video, show that the proposed method outperforms state-of-the-art approaches. Our code is available at https://github.com/mentian/object-posenet.