 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust 3D Hand Pose Estimation in Single Depth Images: from Single-View CNN to Multi-View CNNs
Paper and Code
Dec 27, 2016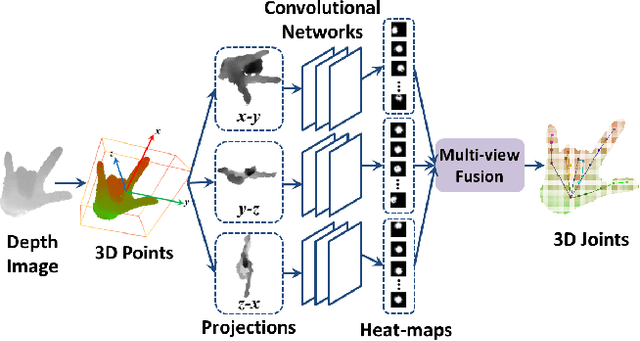

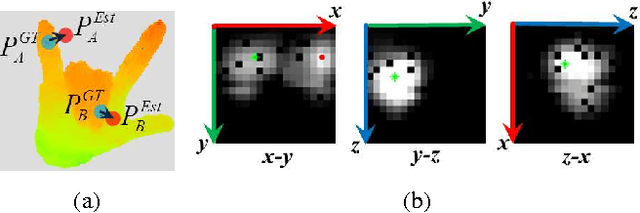
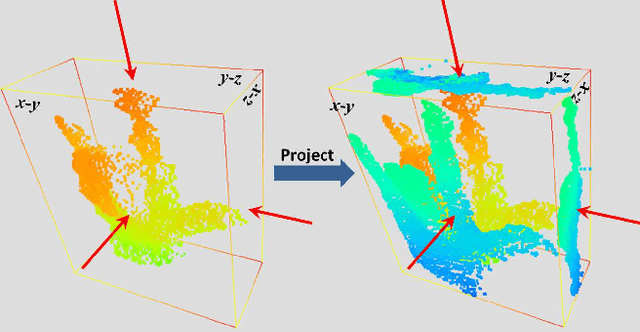
Articulated hand pose estimation plays an important role in human-computer interaction. Despite the recent progress, the accuracy of existing methods is still not satisfactory, partially due to the difficulty of embedded high-dimensional and non-linear regression problem. Different from the existing discriminative methods that regress for the hand pose with a single depth image, we propose to first project the query depth image onto three orthogonal planes and utilize these multi-view projections to regress for 2D heat-maps which estimate the joint positions on each plane. These multi-view heat-maps are then fused to produce final 3D hand pose estimation with learned pose priors. Experiments show that the proposed method largely outperforms state-of-the-art on a challenging dataset. Moreover, a cross-dataset experiment also demonstrates the good generalization ability of the proposed method.