 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot In a Room: Toward Perfect Object Recognition in Closed Environments
Paper and Code
Jul 09, 2015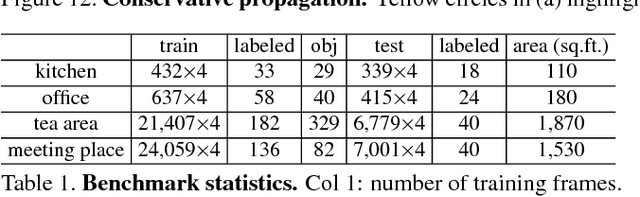
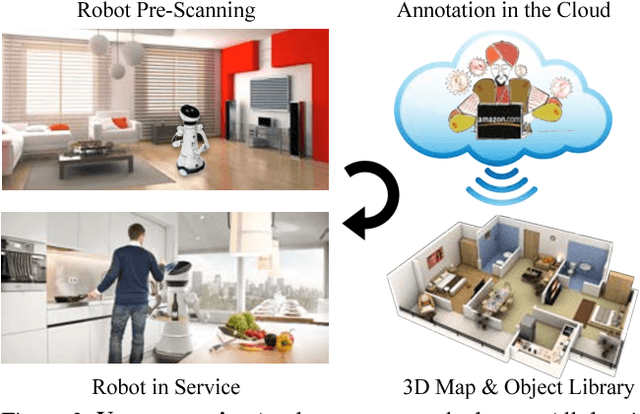

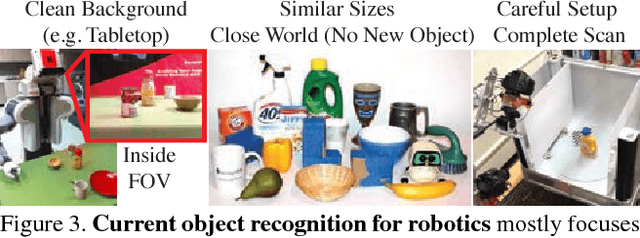
While general object recognition is still far from being solved, this paper proposes a way for a robot to recognize every object at an almost human-level accuracy. Our key observation is that many robots will stay in a relatively closed environment (e.g. a house or an office). By constraining a robot to stay in a limited territory, we can ensure that the robot has seen most objects before and the speed of introducing a new object is slow. Furthermore, we can build a 3D map of the environment to reliably subtract the background to make recognition easier. We propose extremely robust algorithms to obtain a 3D map and enable humans to collectively annotate objects. During testing time, our algorithm can recognize all objects very reliably, and query humans from crowd sourcing platform if confidence is low or new objects are identified. This paper explains design decisions in building such a system, and constructs a benchmark for extensive evaluation. Experiments suggest that making robot vision appear to be working from an end user's perspective is a reachable goal today, as long as the robot stays in a closed environment. By formulating this task, we hope to lay the foundation of a new direction in vision for robotics. Code and data will be available upon acceptance.