 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRmagine: 3D Range Sensor Simulation in Polygonal Maps via Raytracing for Embedded Hardware on Mobile Robots
Paper and Code
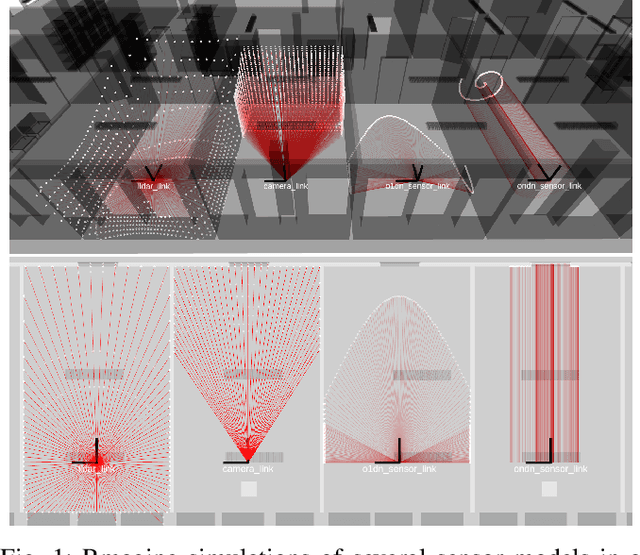
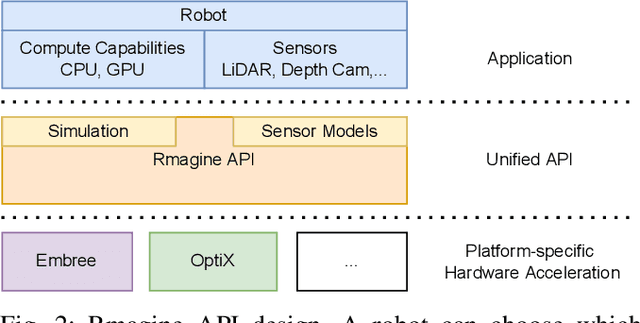
Sensor simulation has emerged as a promising and powerful technique to find solutions to many real-world robotic tasks like localization and pose tracking.However, commonly used simulators have high hardware requirements and are therefore used mostly on high-end computers. In this paper, we present an approach to simulate range sensors directly on embedded hardware of mobile robots that use triangle meshes as environment map. This library called Rmagine allows a robot to simulate sensor data for arbitrary range sensors directly on board via raytracing. Since robots typically only have limited computational resources, the Rmagine aims at being flexible and lightweight, while scaling well even to large environment maps. It runs on several platforms like Laptops or embedded computing boards like Nvidia Jetson by putting an unified API over the specific proprietary libraries provided by the hardware manufacturers. This work is designed to support the future development of robotic applications depending on simulation of range data that could previously not be computed in reasonable time on mobile systems.