 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLSS: A Deep Reinforcement Learning Algorithm for Sequential Scene Generation
Paper and Code
Jun 01, 2022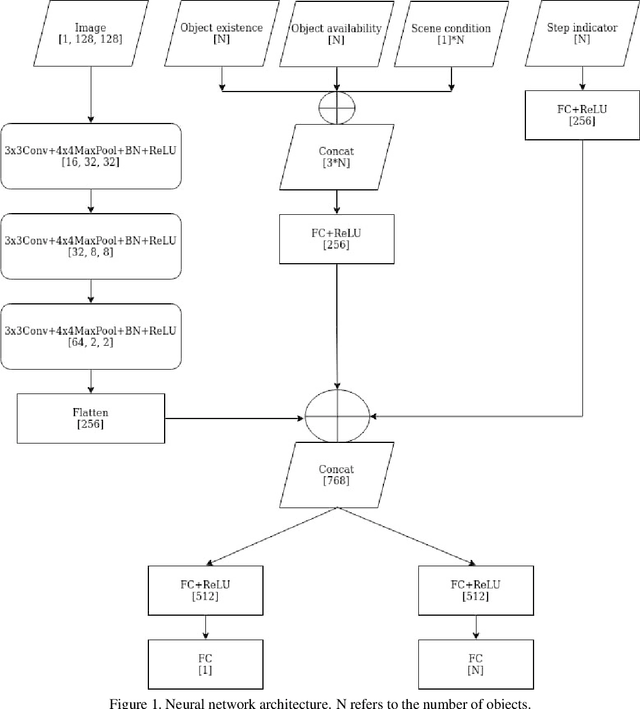
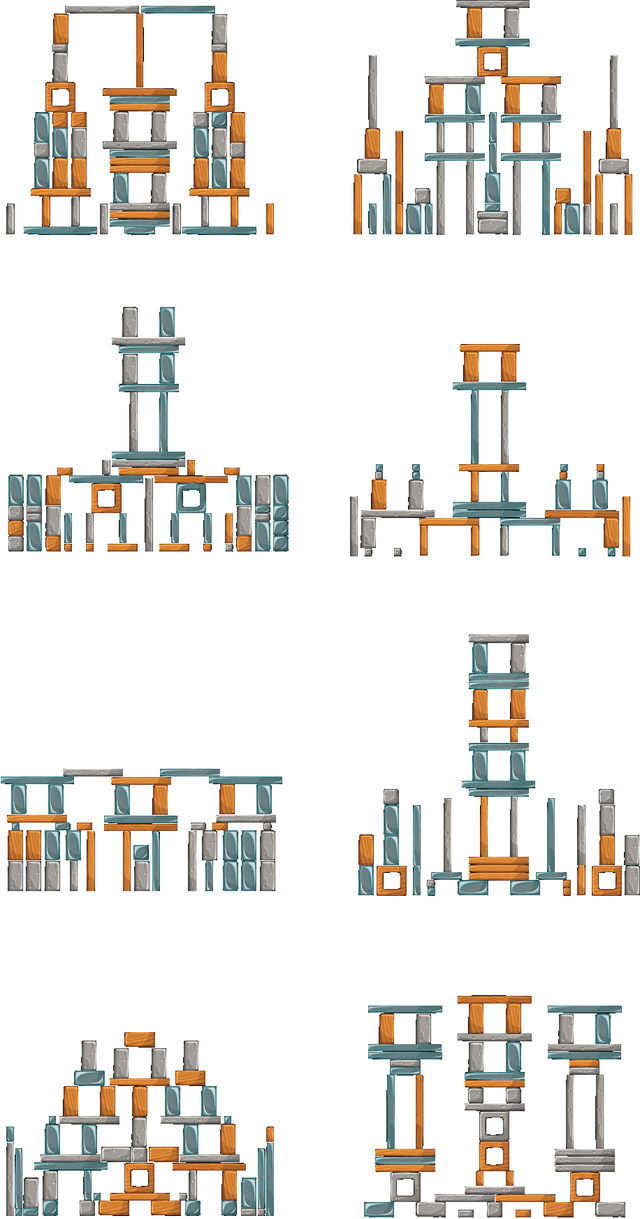
We present RLSS: a reinforcement learning algorithm for sequential scene generation. This is based on employing the proximal policy optimization (PPO) algorithm for generative problems. In particular, we consider how to effectively reduce the action space by including a greedy search algorithm in the learning process. Our experiments demonstrate that our method converges for a relatively large number of actions and learns to generate scenes with predefined design objectives. This approach is placing objects iteratively in the virtual scene. In each step, the network chooses which objects to place and selects positions which result in maximal reward. A high reward is assigned if the last action resulted in desired properties whereas the violation of constraints is penalized. We demonstrate the capability of our method to generate plausible and diverse scenes efficiently by solving indoor planning problems and generating Angry Birds levels.