 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Robot Control in Dynamic Environments Using Belief Control Barrier Functions
Paper and Code
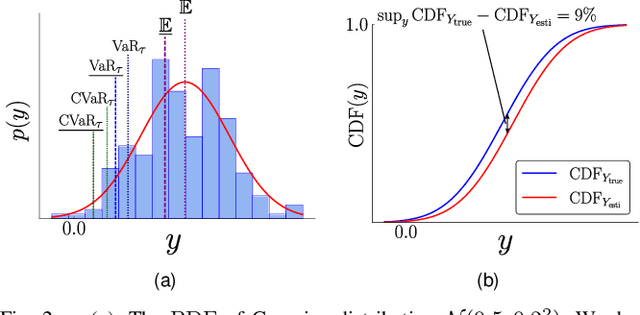
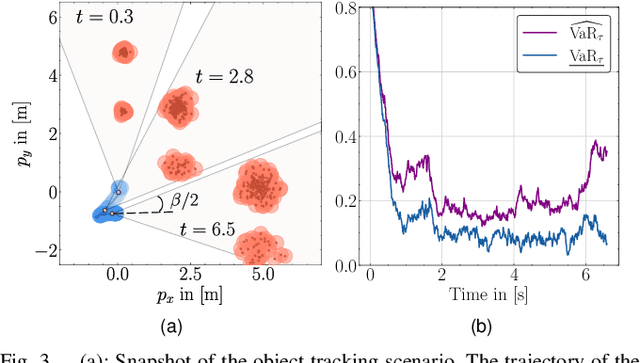
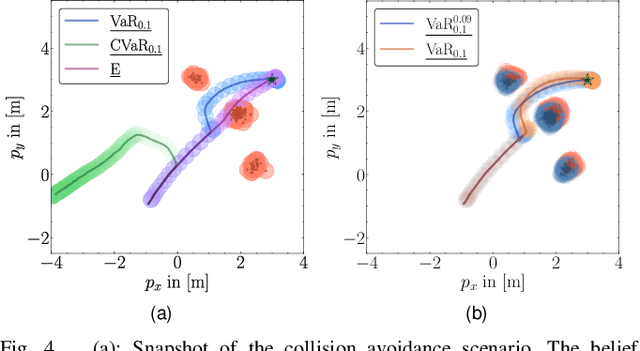
Ensuring safety for autonomous robots operating in dynamic environments can be challenging due to factors such as unmodeled dynamics, noisy sensor measurements, and partial observability. To account for these limitations, it is common to maintain a belief distribution over the true state. This belief could be a non-parametric, sample-based representation to capture uncertainty more flexibly. In this paper, we propose a novel form of Belief Control Barrier Functions (BCBFs) specifically designed to ensure safety in dynamic environments under stochastic dynamics and a sample-based belief about the environment state. Our approach incorporates provable concentration bounds on tail risk measures into BCBFs, effectively addressing possible multimodal and skewed belief distributions represented by samples. Moreover, the proposed method demonstrates robustness against distributional shifts up to a predefined bound. We validate the effectiveness and real-time performance (approximately 1kHz) of the proposed method through two simulated underwater robotic applications: object tracking and dynamic collision avoidance.