 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRight Place, Right Time! Towards ObjectNav for Non-Stationary Goals
Paper and Code
Mar 14, 2024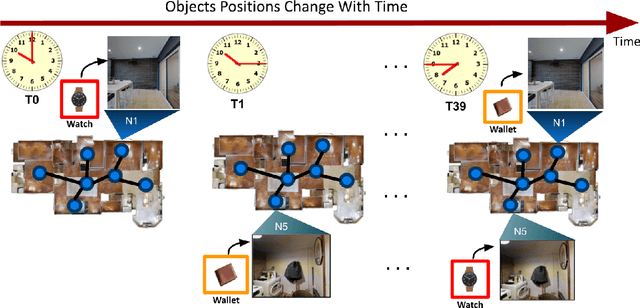
We present a novel approach to tackle the ObjectNav task for non-stationary and potentially occluded targets in an indoor environment. We refer to this task Portable ObjectNav (or P-ObjectNav), and in this work, present its formulation, feasibility, and a navigation benchmark using a novel memory-enhanced LLM-based policy. In contrast to ObjNav where target object locations are fixed for each episode, P-ObjectNav tackles the challenging case where the target objects move during the episode. This adds a layer of time-sensitivity to navigation, and is particularly relevant in scenarios where the agent needs to find portable targets (e.g. misplaced wallets) in human-centric environments. The agent needs to estimate not just the correct location of the target, but also the time at which the target is at that location for visual grounding -- raising the question about the feasibility of the task. We address this concern by inferring results on two cases for object placement: one where the objects placed follow a routine or a path, and the other where they are placed at random. We dynamize Matterport3D for these experiments, and modify PPO and LLM-based navigation policies for evaluation. Using PPO, we observe that agent performance in the random case stagnates, while the agent in the routine-following environment continues to improve, allowing us to infer that P-ObjectNav is solvable in environments with routine-following object placement. Using memory-enhancement on an LLM-based policy, we set a benchmark for P-ObjectNav. Our memory-enhanced agent significantly outperforms their non-memory-based counterparts across object placement scenarios by 71.76% and 74.68% on average when measured by Success Rate (SR) and Success Rate weighted by Path Length (SRPL), showing the influence of memory on improving P-ObjectNav performance. Our code and dataset will be made publicly available.