 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRhythmic Representations: Learning Periodic Patterns for Scalable Place Recognition at a Sub-Linear Storage Cost
Paper and Code
Dec 22, 2017
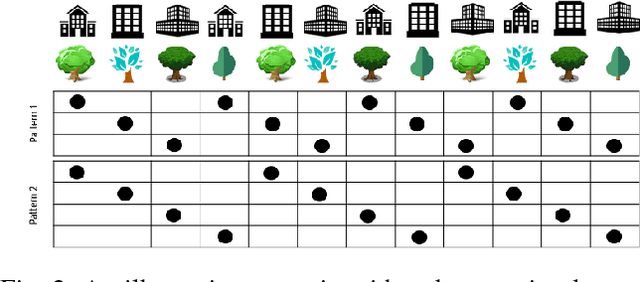
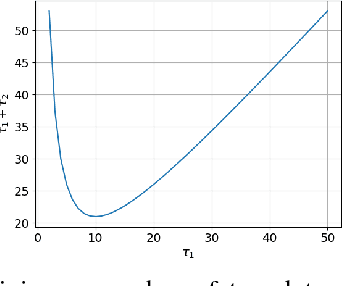
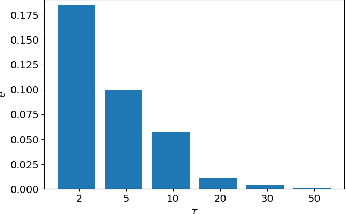
Robotic and animal mapping systems share many challenges and characteristics: they must function in a wide variety of environmental conditions, enable the robot or animal to navigate effectively to find food or shelter, and be computationally tractable from both a speed and storage perspective. With regards to map storage, the mammalian brain appears to take a diametrically opposed approach to all current robotic mapping systems. Where robotic mapping systems attempt to solve the data association problem to minimise representational aliasing, neurons in the brain intentionally break data association by encoding large (potentially unlimited) numbers of places with a single neuron. In this paper, we propose a novel method based on supervised learning techniques that seeks out regularly repeating visual patterns in the environment with mutually complementary co-prime frequencies, and an encoding scheme that enables storage requirements to grow sub-linearly with the size of the environment being mapped. To improve robustness in challenging real-world environments while maintaining storage growth sub-linearity, we incorporate both multi-exemplar learning and data augmentation techniques. Using large benchmark robotic mapping datasets, we demonstrate the combined system achieving high-performance place recognition with sub-linear storage requirements, and characterize the performance-storage growth trade-off curve. The work serves as the first robotic mapping system with sub-linear storage scaling properties, as well as the first large-scale demonstration in real-world environments of one of the proposed memory benefits of these neurons.