 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReversing the cycle: self-supervised deep stereo through enhanced monocular distillation
Paper and Code
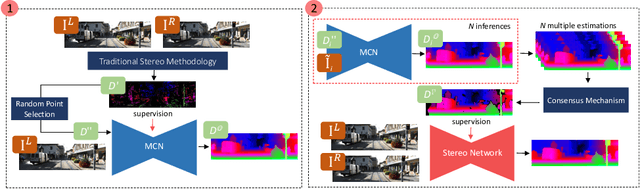

In many fields, self-supervised learning solutions are rapidly evolving and filling the gap with supervised approaches. This fact occurs for depth estimation based on either monocular or stereo, with the latter often providing a valid source of self-supervision for the former. In contrast, to soften typical stereo artefacts, we propose a novel self-supervised paradigm reversing the link between the two. Purposely, in order to train deep stereo networks, we distill knowledge through a monocular completion network. This architecture exploits single-image clues and few sparse points, sourced by traditional stereo algorithms, to estimate dense yet accurate disparity maps by means of a consensus mechanism over multiple estimations. We thoroughly evaluate with popular stereo datasets the impact of different supervisory signals showing how stereo networks trained with our paradigm outperform existing self-supervised frameworks. Finally, our proposal achieves notable generalization capabilities dealing with domain shift issues. Code available at https://github.com/FilippoAleotti/Reversing