 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReverse Psychology in Trust-Aware Human-Robot Interaction
Paper and Code
Mar 18, 2021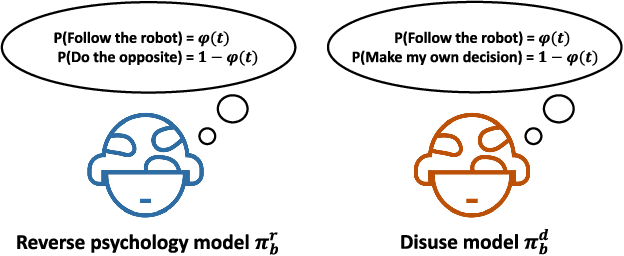



To facilitate effective human-robot interaction (HRI), trust-aware HRI has been proposed, wherein the robotic agent explicitly considers the human's trust during its planning and decision making. The success of trust-aware HRI depends on the specification of a trust dynamics model and a trust-behavior model. In this study, we proposed one novel trust-behavior model, namely the reverse psychology model, and compared it against the commonly used disuse model. We examined how the two models affect the robot's optimal policy and the human-robot team performance. Results indicate that the robot will deliberately "manipulate" the human's trust under the reverse psychology model. To correct this "manipulative" behavior, we proposed a trust-seeking reward function that facilitates trust establishment without significantly sacrificing the team performance.