 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Self-driving: Multi-task Knowledge for Better Generalization and Accident Explanation Ability
Paper and Code
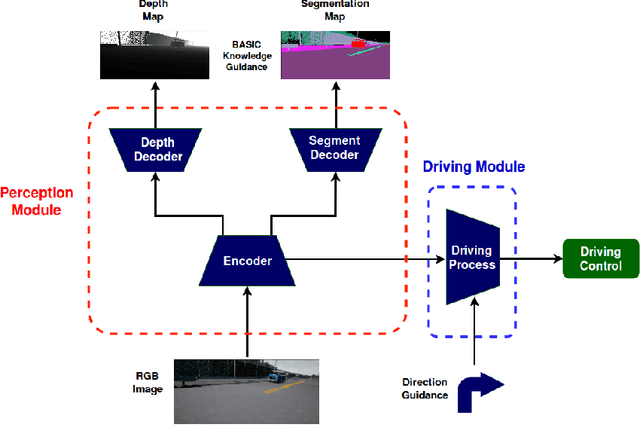
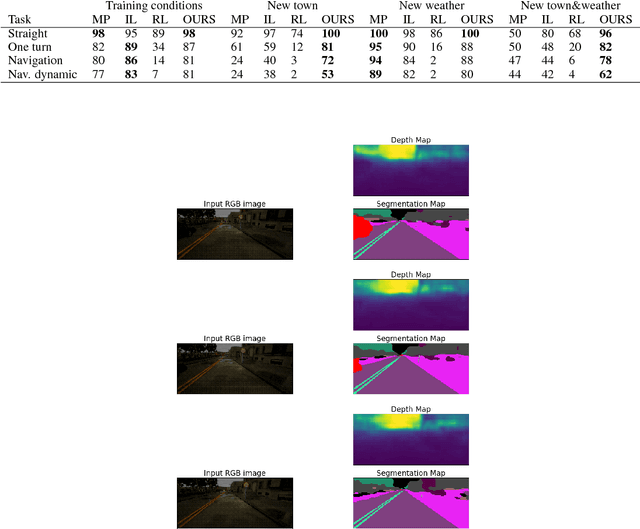
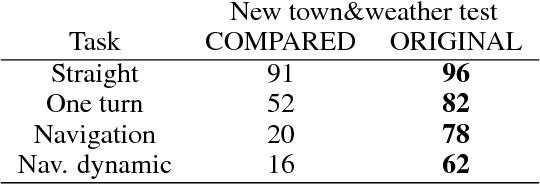
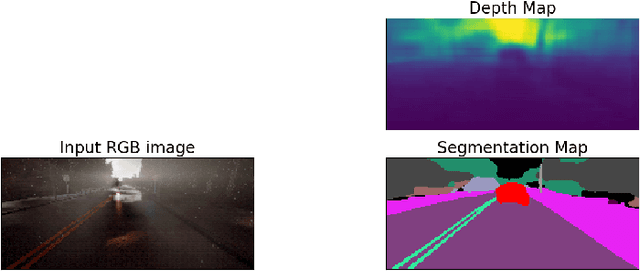
Current end-to-end deep learning driving models have two problems: (1) Poor generalization ability of unobserved driving environment when diversity of training driving dataset is limited (2) Lack of accident explanation ability when driving models don't work as expected. To tackle these two problems, rooted on the believe that knowledge of associated easy task is benificial for addressing difficult task, we proposed a new driving model which is composed of perception module for \textit{see and think} and driving module for \textit{behave}, and trained it with multi-task perception-related basic knowledge and driving knowledge stepwisely. Specifically segmentation map and depth map (pixel level understanding of images) were considered as \textit{what \& where} and \textit{how far} knowledge for tackling easier driving-related perception problems before generating final control commands for difficult driving task. The results of experiments demonstrated the effectiveness of multi-task perception knowledge for better generalization and accident explanation ability. With our method the average sucess rate of finishing most difficult navigation tasks in untrained city of CoRL test surpassed current benchmark method for 15 percent in trained weather and 20 percent in untrained weathers. Demonstration video link is: https://www.youtube.com/watch?v=N7ePnnZZwdE