 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking of Radar's Role: A Camera-Radar Dataset and Systematic Annotator via Coordinate Alignment
Paper and Code
May 11, 2021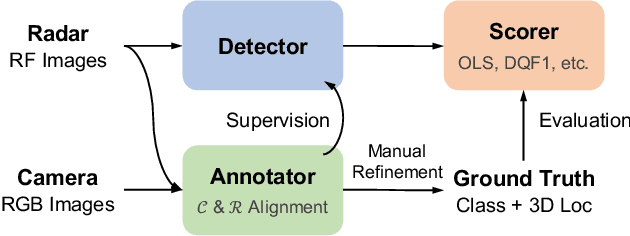
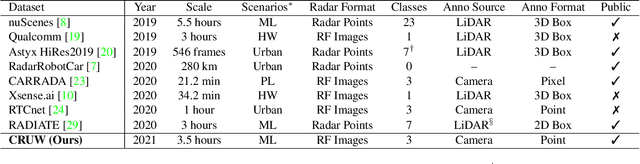
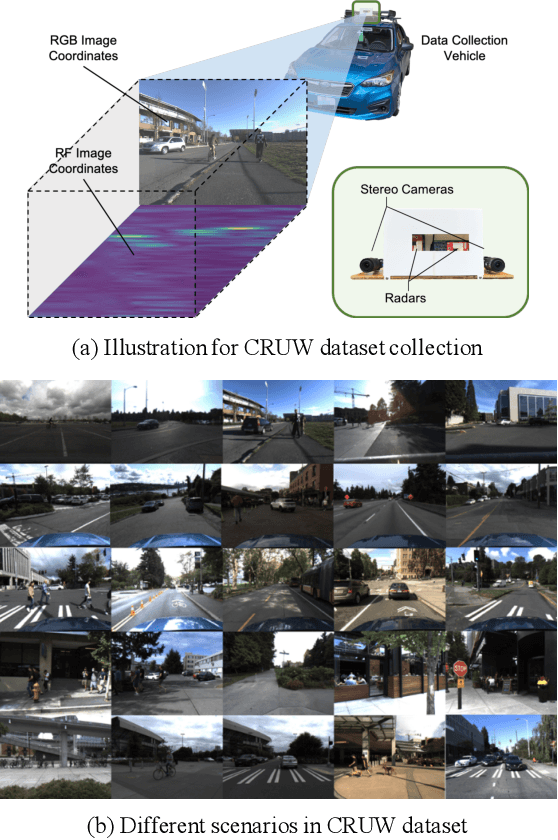
Radar has long been a common sensor on autonomous vehicles for obstacle ranging and speed estimation. However, as a robust sensor to all-weather conditions, radar's capability has not been well-exploited, compared with camera or LiDAR. Instead of just serving as a supplementary sensor, radar's rich information hidden in the radio frequencies can potentially provide useful clues to achieve more complicated tasks, like object classification and detection. In this paper, we propose a new dataset, named CRUW, with a systematic annotator and performance evaluation system to address the radar object detection (ROD) task, which aims to classify and localize the objects in 3D purely from radar's radio frequency (RF) images. To the best of our knowledge, CRUW is the first public large-scale dataset with a systematic annotation and evaluation system, which involves camera RGB images and radar RF images, collected in various driving scenarios.