Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Learning Dynamics in RL using Adversarial Networks
Paper and Code
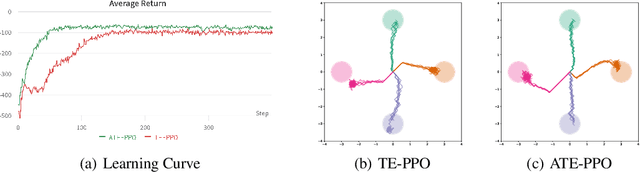
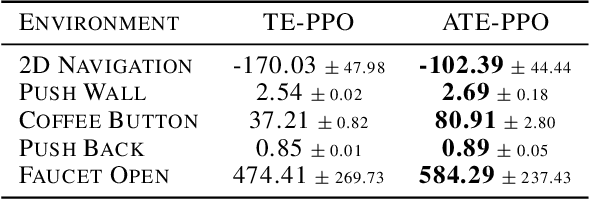
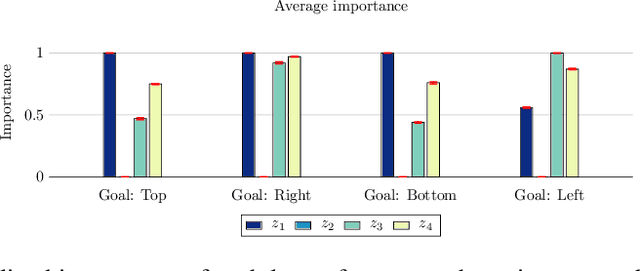
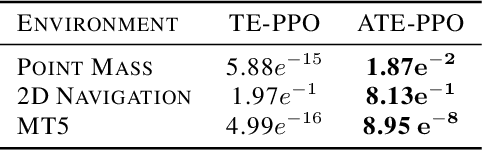
We present a learning mechanism for reinforcement learning of closely related skills parameterized via a skill embedding space. Our approach is grounded on the intuition that nothing makes you learn better than a coevolving adversary. The main contribution of our work is to formulate an adversarial training regime for reinforcement learning with the help of entropy-regularized policy gradient formulation. We also adapt existing measures of causal attribution to draw insights from the skills learned. Our experiments demonstrate that the adversarial process leads to a better exploration of multiple solutions and understanding the minimum number of different skills necessary to solve a given set of tasks.
View paper on
 OpenReview
OpenReview