 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRestorebot: Towards an Autonomous Robotics Platform for Degraded Rangeland Restoration
Paper and Code
Dec 12, 2023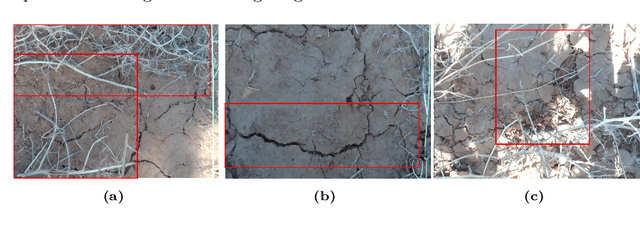

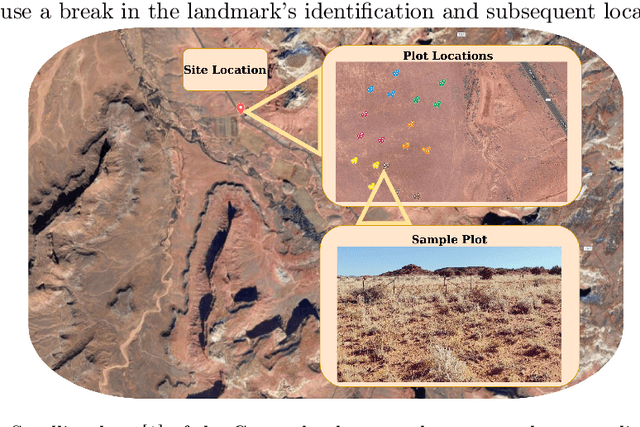

Degraded rangelands undergo continual shifts in the appearance and distribution of plant life. The nature of these changes however is subtle: between seasons seedlings sprout up and some flourish while others perish, meanwhile, over multiple seasons they experience fluctuating precipitation volumes and can be grazed by livestock. The nature of these conditioning variables makes it difficult for ecologists to quantify the efficacy of intervention techniques under study. To support these observation and intervention tasks, we develop RestoreBot: a mobile robotic platform designed for gathering data in degraded rangelands for the purpose of data collection and intervention in order to support revegetation. Over the course of multiple deployments, we outline the opportunities and challenges of autonomous data collection for revegetation and the importance of further effort in this area. Specifically, we identify that localization, mapping, data association, and terrain assessment remain open problems for deployment, but that recent advances in computer vision, sensing, and autonomy offer promising prospects for autonomous revegetation.