 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRESPRECT: Speeding-up Multi-fingered Grasping with Residual Reinforcement Learning
Paper and Code
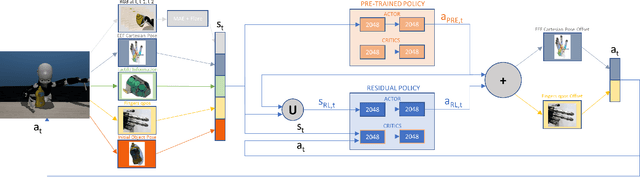


Deep Reinforcement Learning (DRL) has proven effective in learning control policies using robotic grippers, but much less practical for solving the problem of grasping with dexterous hands -- especially on real robotic platforms -- due to the high dimensionality of the problem. In this work, we focus on the multi-fingered grasping task with the anthropomorphic hand of the iCub humanoid. We propose the RESidual learning with PREtrained CriTics (RESPRECT) method that, starting from a policy pre-trained on a large set of objects, can learn a residual policy to grasp a novel object in a fraction ($\sim 5 \times$ faster) of the timesteps required to train a policy from scratch, without requiring any task demonstration. To our knowledge, this is the first Residual Reinforcement Learning (RRL) approach that learns a residual policy on top of another policy pre-trained with DRL. We exploit some components of the pre-trained policy during residual learning that further speed-up the training. We benchmark our results in the iCub simulated environment, and we show that RESPRECT can be effectively used to learn a multi-fingered grasping policy on the real iCub robot. The code to reproduce the experiments is released together with the paper with an open source license.