 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReplicability in Reinforcement Learning
Paper and Code

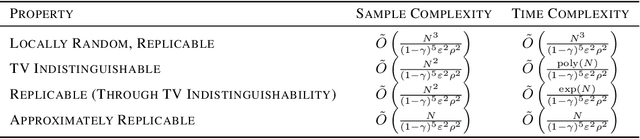
We initiate the mathematical study of replicability as an algorithmic property in the context of reinforcement learning (RL). We focus on the fundamental setting of discounted tabular MDPs with access to a generative model. Inspired by Impagliazzo et al. [2022], we say that an RL algorithm is replicable if, with high probability, it outputs the exact same policy after two executions on i.i.d. samples drawn from the generator when its internal randomness is the same. We first provide an efficient $\rho$-replicable algorithm for $(\varepsilon, \delta)$-optimal policy estimation with sample and time complexity $\widetilde O\left(\frac{N^3\cdot\log(1/\delta)}{(1-\gamma)^5\cdot\varepsilon^2\cdot\rho^2}\right)$, where $N$ is the number of state-action pairs. Next, for the subclass of deterministic algorithms, we provide a lower bound of order $\Omega\left(\frac{N^3}{(1-\gamma)^3\cdot\varepsilon^2\cdot\rho^2}\right)$. Then, we study a relaxed version of replicability proposed by Kalavasis et al. [2023] called TV indistinguishability. We design a computationally efficient TV indistinguishable algorithm for policy estimation whose sample complexity is $\widetilde O\left(\frac{N^2\cdot\log(1/\delta)}{(1-\gamma)^5\cdot\varepsilon^2\cdot\rho^2}\right)$. At the cost of $\exp(N)$ running time, we transform these TV indistinguishable algorithms to $\rho$-replicable ones without increasing their sample complexity. Finally, we introduce the notion of approximate-replicability where we only require that two outputted policies are close under an appropriate statistical divergence (e.g., Renyi) and show an improved sample complexity of $\widetilde O\left(\frac{N\cdot\log(1/\delta)}{(1-\gamma)^5\cdot\varepsilon^2\cdot\rho^2}\right)$.