 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReparameterizable Dual-Resolution Network for Real-time Semantic Segmentation
Paper and Code
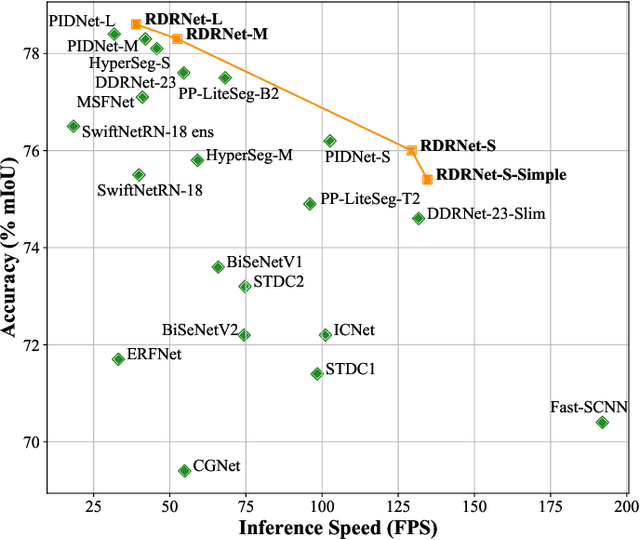
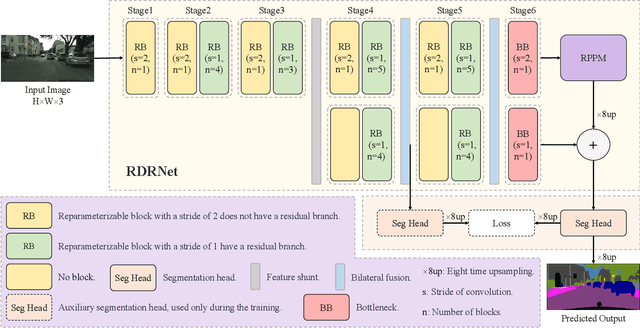
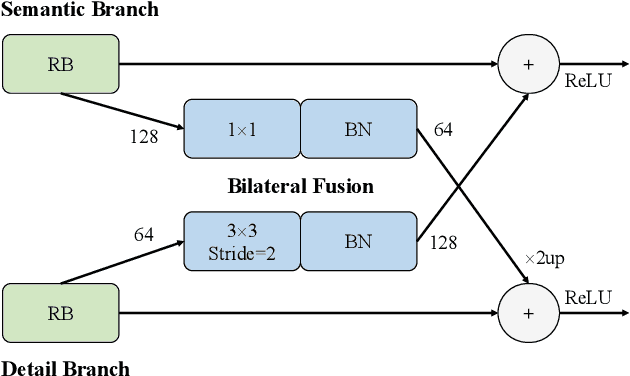
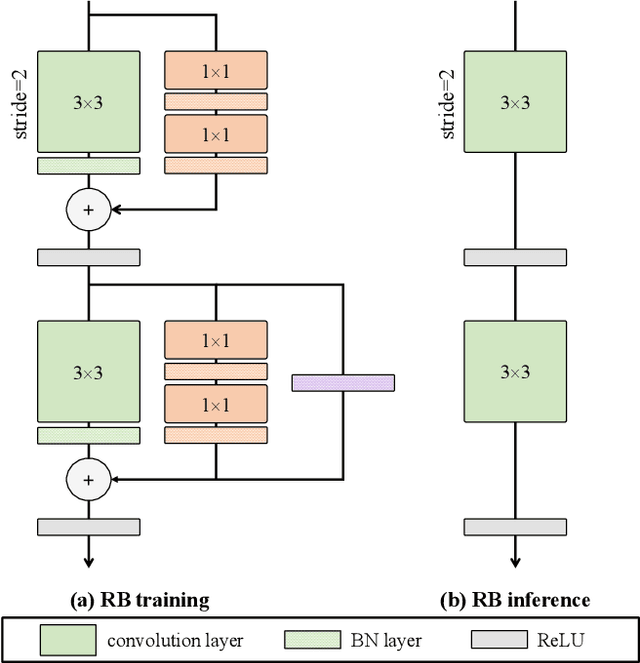
Semantic segmentation plays a key role in applications such as autonomous driving and medical image. Although existing real-time semantic segmentation models achieve a commendable balance between accuracy and speed, their multi-path blocks still affect overall speed. To address this issue, this study proposes a Reparameterizable Dual-Resolution Network (RDRNet) dedicated to real-time semantic segmentation. Specifically, RDRNet employs a two-branch architecture, utilizing multi-path blocks during training and reparameterizing them into single-path blocks during inference, thereby enhancing both accuracy and inference speed simultaneously. Furthermore, we propose the Reparameterizable Pyramid Pooling Module (RPPM) to enhance the feature representation of the pyramid pooling module without increasing its inference time. Experimental results on the Cityscapes, CamVid, and Pascal VOC 2012 datasets demonstrate that RDRNet outperforms existing state-of-the-art models in terms of both performance and speed. The code is available at https://github.com/gyyang23/RDRNet.