 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepairing People Trajectories Based on Point Clustering
Paper and Code
Jul 02, 2010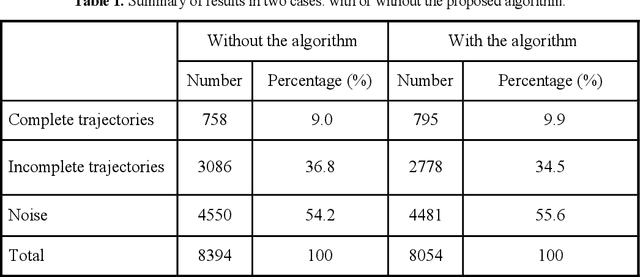

This paper presents a method for improving any object tracking algorithm based on machine learning. During the training phase, important trajectory features are extracted which are then used to calculate a confidence value of trajectory. The positions at which objects are usually lost and found are clustered in order to construct the set of 'lost zones' and 'found zones' in the scene. Using these zones, we construct a triplet set of zones i.e. three zones: In/Out zone (zone where an object can enter or exit the scene), 'lost zone' and 'found zone'. Thanks to these triplets, during the testing phase, we can repair the erroneous trajectories according to which triplet they are most likely to belong to. The advantage of our approach over the existing state of the art approaches is that (i) this method does not depend on a predefined contextual scene, (ii) we exploit the semantic of the scene and (iii) we have proposed a method to filter out noisy trajectories based on their confidence value.